|
صفحه اصلي /
مسابقات رباتيك /
رباتهاي خانگي /
رباتهاي خانگي /
درباره ليگ رباتهاي خانگي
درباره ليگ رباتهاي خانگي :
لیگ رباتهای خانگی لیگی
جدید در مسابقات روبوکاپ میباشد که تمرکز آن بر روی کاربردهای دنیای
واقعی و تعامل
بین انسان و ماشین با
استفاده از رباتهای خودمختار میباشد. هدف این لیگ تشویق و توسعه
کاربردهای مفید و
یاریگر انسان در زندگی
روزمره، در حوزه رباتیک میباشد.

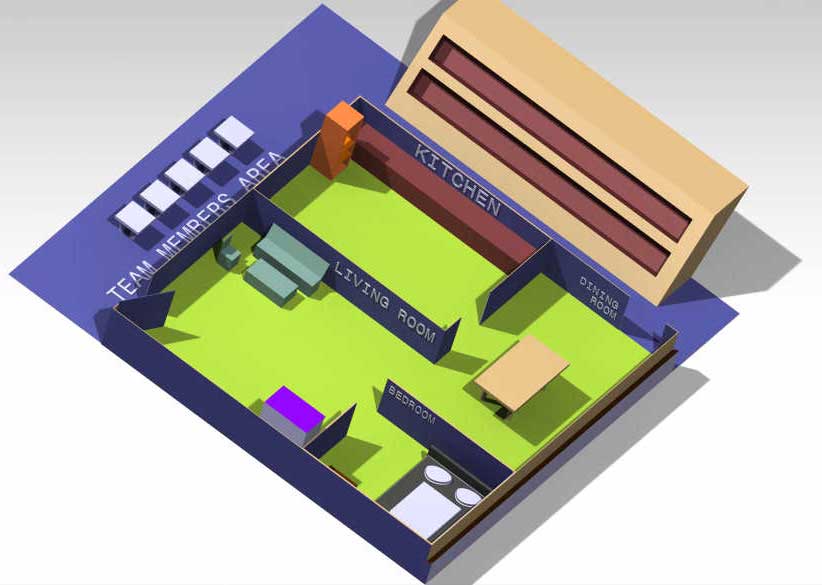
تصویر شبیه سازی شده
ی محیط مسابقات لیگ ربات خانگی-ربوکاپ آزاد ایران ۲۰۱۳:
مطالب
زير از سايت تبيان برگرفته شده است :
http://www.tebyan.net/newindex.aspx?pid=169637
مسابقات روبوکاپ در لیگ
های متعدد و متنوعی برگزار می گردد تا هر کسی در هر لیگی که علاقه دارد
شرکت نماید، رباتهای خانگی
لیگی است که به
نسبت از لیگ های دیگر مسابقات Robocup جدیدتر است این لیگ در مراحل
مختلفی برگزار می گردد و سالانه قوانین
آن سنگین تر می
شود.
--------------------------------------------------------------------------------
در مطلب مسابقات Robocup لیگ های این سری از مسابقات را معرفی نمودیم ،
مسابقات روبوکاپ در لیگ های متعدد و متنوعی
برگزار می گردد تا
هر کسی در هر لیگی که علاقه دارد شرکت نماید.
اگرچه شخصا به بسیاری از لیگ های آن علاقه دارم و هر کدام جذابیت خود
را دارد اما لیگی که در آن شرکت نمودم لیگ @Home یا
ربات های خانگی
بوده است که توضیحی در مورد این مسابقه قوانین آن به همراه فیلمی از
مسابقات آتلانتا قرار داده شده است.
امیدوارم جهت آشنایی
مخاطبان عزیز مفید باشد.
رباتهای خانگی لیگی است که به نسبت از لیگ های دیگر مسابقات Robocup
جدیدتر است این لیگ در مراحل مختلفی
برگزار می شود و
سالانه قوانین آن سنگین تر می شود.
ولی کلیت آن شناخته شدن انسان توسط ربات و اطاعت از اوست، این که ربات
شما، شما را از یک فرد غریبه تشخیص دهد
و از فرامین شما
اطاعت کند.
در مسابقات روبوکاپ که در کشور آمریکا – آتلانتا – دانشگاه جورجیا
برگزار شد این لیگ دارای 3 مرحله بود:
در مرحله اول ربات انسان را تشخیص دهد و به دنبال او حرکت کند ، ربات
نباید بیش از 1 متر از فرد فاصله داشته باشد. این فاصله ممکن است در
مسابقات مختلف در سالهای گوناگون متفاوت باشد.
این پروسه چندان کار آسانی نبود زیرا برای رباتی که قدرت دیدن و تشخیص
ندارد باید از پردازش تصویر استفاده می شد و این پردازش تصویر نمی
توانست با امکانات و هزینه های دانشجویان خیلی پیچیده باشد و البته
میزان اطلاعات آنها هم به اندازه کافی نبود.
ایده های مختلفی در پردازش تصویری که به صورت حرفه ای است وجود دارد
مثلا یک ایده وجود دارد که:
5 نقطه از صورت در نظر گرفته می شود که می گویند این 5 نقطه در
انسانهای مختلف متفاوت است و مانند اثر انگشت
در هر فردی منحصر به فرد
است و با توجه به آن پردازش صورت می گیرد اما در این مسابقا ت
نیازی به پردازش صورت نبود ت
نیازی به پردازش صورت نبود
و تنها کافی است
جسمی در حال حرکت را تشخیص دهد شما برای طراحی این بخش چه ایده ای
دارید؟
شما به ربات می گوئید
: این جسم متحرک دارای گرما به شکل تقریبی یک بیضی است که یک چیزی شبیه
یک دایره بر روی آن قرار دارد!!! منظور بدن و سر انسان است!
• ایده اول: اولین راهی که مطرح شد آن بود که از سنسور حرکتی
استفاده شود یعنی ربات به دنبال هر چیز متحرکت حرکت نماید این راه
آزمایش می شود ، ایده خوب و ساده ای است اما:
در صحنه مسابقه اگر هر جسم متحرک دیگری وجود داشته باشد ربات آن را با
سوژه اصلی اشتباه می گیرد مثلا حضور تلویزیون روشن سبب می شود که ربات
در کنار تلویزیون بماند!
• ایده دوم: دومین راه استفاده از سنسورهای گرمایی است به طور
مثال ما هر وسیله ای را که دمای 25 درجه از خود ساطع می کرد را برای
ربات تعریف کنیم که این موجود را دنبال کن قطعا به دنبال انسان موجود
در صحنه به راه می افتد (توجه داشته باشید که در مرحله اول تنها یک فرد
در محیط مسابقه وجود دارد و ربات فقط باید انسان را از بی جان تشخیص
دهد و قرار نیست بین دو نفر یکی را انتخاب کند) این هم ایده خوبی است
اما:
اگر در محیط مسابقه چیزی دما داشته باشد مثلا شفاژ یا وسیله گرمایشی
دیگری باشد ربات به سمت آن رفته و آن را سوژه در نظر می گیرد
• ایده سوم: در ایده سوم دو ایده یک و دو را با هم ترکیب می
کنیم و این گونه طراحی می کنیم که هر جسمی که دما دارد، (محدوده دمایی
را می توانید تعریف کنید) که از دید ربات رنگ آن قرمز است ، و حرکت می
کند و البته برای محکم شدن کار شکل تقریبی آن را هم به ربات می گوئیم
از آنجایی که تعریف شکل را باید با اشکال هندسی ساده عنوان کنیم این
گونه مطرح می کنیم که:

این جسم متحرک دارای گرما به شکل تقریبی یک بیضی است که یک چیزی شبیه
یک دایره بر روی آن قرار دارد!!! منظور بدن و سر انسان است!
در این مسابقه فرد داوطلب که نباید از اعضاء تیم باشد ابتدا با جمله
"Follow me" که در حقیقت جمله ای است که برای ربات تعریف شده که در پشت
سر فرد حرکت کند شروع به حرکت کرده اما از آنجایی که تنها قرار است یک
فرد در محیط باشد با نزدیک شدن داور به ربات مسیر را تغییر داده و فرد
دیگر را تعقیب می کند. بنابر این این مرحله تکرار شد.
شما به ربات می گوئید : این جسم متحرک دارای گرما به شکل تقریبی یک
بیضی است که یک چیزی شبیه یک دایره بر روی آن قرار دارد!!! منظور بدن و
سر انسان است!
در اینجا مطرح کردن دو نکته را لازم می دانم
• نکته اول : آنکه این فیلم متعلق به رقابت یکی از بهترین تیم های حاضر
در مسابقه است که از الگوریتم مناسبی استفاده شده است.
• و نکته دوم : آنکه متن فوق برای افراد مبتدی نوشته شده است و به صرف
آشنایی است اگر شما فردی هستید که به صورت تخصصی در زمینه پردازش تصویر
کار می کنید می توانید برای کسب اطلاعات بیشتر و به دست آوردن قوانین
کامل به سایت Robocup.org مراجعه نمائید.
در مطلب قبلی در مورد
مرحله اول مسابقات رباتهای خانگی گفتگو کردیم که ربات به دنبال فرد راه
افتاده و او را دنبال میکند در مرحله دوم موقعیت اشیاء مختلف در داخل
خانه برای ربات توضیح داده میشود که این کار را افراد تیم پیش از شروع
مسابقه در زمانی که برای آنها در نظر گرفته میشود انجام میدهند در
این زمینه هم ایدههای متفاوتی وجود دارد.
ایده اول:
شما میتوانید در اولین نگاه اینگونه نظر دهید که ربات میتواند
مختصات زمین را به خاطر بسپارد در حقیقت ربات موقعیت اشیاء مختلف خانه
را حفظ باشد.
در مسابقات ربات های لابیرنت که ربات به جای موش است و باید در ماز به
پنیر برسد این ایده خوبی است.
مسابقه لابیرنت از سری مسابقاتی است که شما ممکن است در کودکی آن را
انجام داده باشید که در یک سو موشی قرار دارد و باید به پنیر برسد که
در سوی دیگر است.
در این مسابقه ربات نقش موش را بازی میکند و نقشه کلی را ندارد یعنی
در مسیرهای مختلف حرکت کرده در صورتی که مسیر در انتها بسته بود در
حافظه آن مسیر را مسدود اعلام میکند تا جایی که مسیر اصلی را بیابد،
صفحه مسابقه شطرنجی است. که به ربات کمک کند که از یک خانه وارد خانه
بعدی شده است (در مقاله بعدی الگوریتم این مسابقه را به طور کامل تشریح
میکنیم).
سپس یکبار دیگر با حافظه خود مسیر را از ابتدا طی میکند (این مرحله
دوم مسابقه است) و میانگین زمانی امتیاز نهایی خواهد شد.
در این سری مسابقات از این ایده استفاده میشود یعنی ربات با استفاده
از سنسورهای مادون قرمزی که در کف وجود دارد پی به حرکت خود میبرد اما
این برای مسابقاتی مناسب است که ربات دید محدودی دارد. در روبوکاپ و
سری مسابقات رباتهای خانگی ربات از پردازش تصویر استفاده میکند پس دید
وسیعتری دارد.
ایده دوم:
ربات ما در اینجا میتواند اشیاء را تشخیص دهد و مثلاً در این خانه جسم
مکعبی بزرگی غیر از یخچال وجود ندارد بنابر این میتوان برای ربات
اشیاء مختلف را با نام آن توضیح داد و مشخص نمود که در صورتی که پردازش
صوت آن کلمه Refrigerator را شنید به سمت این وسیله برود.
استفاده از ترکیبی از رنگ و شکل ظاهری جسم میتواند توامأ ربات را
هدایت میکند.
ایده سوم:
این ربات میتواند از ترکیب دو ایده بالا استفاده کند یعنی هم موقعیتها
را به طور نسبی بداند و هم شکل و رنگ را به خاطر سپارد.
توجه داشته باشید که این تیم یکی از بهترین تیمهای حاضر در مسابقات
است و البته این تیم هم اشتباهاتی را مرتکب شد که ربات کار خود را
دوباره انجام داد که به علت حجم زیاد از فیلم حذف شده است.
در بخشی هم ربات به محض اینکه برگزار کننده در بلند گو صحبت میکند میایستد
و مسیر را ادامه نمیدهد زیرا تصور دارد که دستور جدیدی است.
همانطور که در فیلم مشاهده میکنید زمانی که فرد اعلام میکند که برای
مثال به سمت یخچال برو
Robot goes to the Refrigerator ربات باید حرکت خود را اعلام نماید که
ربات این گروه با عنوان کردن جمله
"I know the location and I am going right now " حرکت خود را اعلام میدارد.
به معنای من مکان مورد نظر را میدانم و الان به آنجا میروم.
زمانی که به محل مورد نظر میرسد اعلام میکند که من در موقعیت هستم
امتیازدهی این مسابقه چنان که در فیلم میبینید به زمان بستگی دارد
یعنی هرچه ربات سریع تر کار خود را انجام دهد امتیاز بیشتری میآورد.
البته مسابقه بدین گونه هم اجراء شده که موقعیت اشیاء عنوان نشده و
ربات با پردازش تصویر جسم را پیدا کند.
------------
اين
قسمت بخش دوم توضيحات در خصوص ليگ مي باشد
http://www.tebyan.net/newindex.aspx?pid=169987
در مطلب قبلی در مورد مرحله اول مسابقات رباتهای خانگی گفتگو کردیم که
ربات به دنبال فرد راه افتاده و او را دنبال میکند در مرحله دوم
موقعیت اشیاء مختلف در داخل خانه برای ربات توضیح داده میشود که این
کار را افراد تیم پیش از شروع مسابقه در زمانی که برای آنها در نظر
گرفته میشود انجام میدهند در این زمینه هم ایدههای متفاوتی وجود
دارد.

ایده اول:
شما میتوانید در اولین نگاه اینگونه نظر دهید که ربات میتواند
مختصات زمین را به خاطر بسپارد در حقیقت ربات موقعیت اشیاء مختلف خانه
را حفظ باشد.
در مسابقات ربات های لابیرنت که ربات به جای موش است و باید در ماز به
پنیر برسد این ایده خوبی است.
مسابقه لابیرنت از سری مسابقاتی است که شما ممکن است در کودکی آن را
انجام داده باشید که در یک سو موشی قرار دارد و باید به پنیر برسد که
در سوی دیگر است.
در این مسابقه ربات نقش موش را بازی میکند و نقشه کلی را ندارد یعنی
در مسیرهای مختلف حرکت کرده در صورتی که مسیر در انتها بسته بود در
حافظه آن مسیر را مسدود اعلام میکند تا جایی که مسیر اصلی را بیابد،
صفحه مسابقه شطرنجی است. که به ربات کمک کند که از یک خانه وارد خانه
بعدی شده است (در مقاله بعدی الگوریتم این مسابقه را به طور کامل تشریح
میکنیم).
سپس یکبار دیگر با حافظه خود مسیر را از ابتدا طی میکند (این مرحله
دوم مسابقه است) و میانگین زمانی امتیاز نهایی خواهد شد.
در این سری مسابقات از این ایده استفاده میشود یعنی ربات با استفاده
از سنسورهای مادون قرمزی که در کف وجود دارد پی به حرکت خود میبرد اما
این برای مسابقاتی مناسب است که ربات دید محدودی دارد. در روبوکاپ و
سری مسابقات رباتهای خانگی ربات از پردازش تصویر استفاده میکند پس دید
وسیعتری دارد.
ایده دوم:
ربات ما در اینجا میتواند اشیاء را تشخیص دهد و مثلاً در این خانه جسم
مکعبی بزرگی غیر از یخچال وجود ندارد بنابر این میتوان برای ربات
اشیاء مختلف را با نام آن توضیح داد و مشخص نمود که در صورتی که پردازش
صوت آن کلمه Refrigerator را شنید به سمت این وسیله برود.
استفاده از ترکیبی از رنگ و شکل ظاهری جسم میتواند توامأ ربات را
هدایت میکند.

ایده سوم:
این ربات میتواند از ترکیب دو ایده بالا استفاده کند یعنی هم موقعیتها
را به طور نسبی بداند و هم شکل و رنگ را به خاطر سپارد.
توجه داشته باشید که این تیم یکی از بهترین تیمهای حاضر در مسابقات
است و البته این تیم هم اشتباهاتی را مرتکب شد که ربات کار خود را
دوباره انجام داد که به علت حجم زیاد از فیلم حذف شده است.
در بخشی هم ربات به محض اینکه برگزار کننده در بلند گو صحبت میکند میایستد
و مسیر را ادامه نمیدهد زیرا تصور دارد که دستور جدیدی است.
همانطور که در فیلم مشاهده میکنید زمانی که فرد اعلام میکند که برای
مثال به سمت یخچال برو
Robot goes to the Refrigerator ربات باید حرکت خود را اعلام نماید که
ربات این گروه با عنوان کردن جمله
"I know the location and I am going right now " حرکت خود را اعلام میدارد.
به معنای من مکان مورد نظر را میدانم و الان به آنجا میروم.
زمانی که به محل مورد نظر میرسد اعلام میکند که من در موقعیت هستم
امتیازدهی این مسابقه چنان که در فیلم میبینید به زمان بستگی دارد
یعنی هرچه ربات سریع تر کار خود را انجام دهد امتیاز بیشتری میآورد.
البته مسابقه بدین گونه هم اجراء شده که موقعیت اشیاء عنوان نشده و
ربات با پردازش تصویر جسم را پیدا کند.
------------------------
در مطلب
مسابقات Robocup PId لیگ های این سری از مسابقات را معرفی نمودیم ،
مسابقات روبوکاپ در لیگ های متعدد و متنوعی برگزار می گردد تا هر کسی
در هر لیگی که علاقه دارد شرکت نماید.
در 2 مطلب قبلی
مسابقات رباتهای خانگی 1
مسابقات رباتهای خانگی 2
به بررسی مراحل 1 و 2 مسابقات روبوکاپ در لیگ خانگی پرداختیم که فیلم
نمونه را نیز می توانید مشاهده کنید:
دانلود فیلم مرحله اول
دانلود فیلم مرحله دوم قسمت 1
دانلود فیلم مرحله دوم قسمت 2
در مرحله سوم که در اینجا به توضیح آن می پردازیم نسبت به دو مرحله
قبلی کمی دشوار تر است البته آنچه که در فیلم شماره 4 که در انتهای
مطلب آمده مشاهده می کنید دموی (Demo) مسابقه در این مرحله است که در
آن یکی از اعضای تیم به توضیح فرایند می پردازد.
در این مرحله ربات باید به درخواست فرد در خانه پاسخ دهد و شیء را که
فرد نیازمند است برایش بیاورد همانطور که در فیلم هم می توانید مشاهده
کنید ربات به جمله ای خاص حساس است که آن “ I forgot my cup” است "من
فنجانم را فراموش کرده ام " یعنی ربات به گونه ای برنامه ریزی شده است
که بتواند با شنیدن این جمله سوالی را مطرح می کند که "Should I go and
get it for you? " بدین معنا که آیا می توانم آن را برای شما بیاورم؟ و
در صورتی که پاسخ بله لطفا را پردازش کرد و یا به بیان ساده تر شنید،
به سمت مکانی که وجود فنجان در آنجا تعریف شده می رود.
(به طور کلی پردازش صوت به 3 بخش کلی تقسیم می شود که شامل کدبندی صوت
، تولید صوت ، تشخیص صوت است که توضیح درباره آن در این مجال نمی
گنجد.)
تا این مرحله که شامل پردازش صوت و یافتن مکان است در مراحل قبل هم
انجام می شده است اما در بخش سوم استفاده از بازوی ربات کار را سخت تر
می کند.
زمانی
که یک ربات می خواهد شیء را بردارد در ابتدا باید فاصله خود را با آن
شیء تشخیص دهد برای این منظور می توانید از سنسورهایی مانند سنسور
مافوق صوت یا Ultrasonic استفاده كنید.
زمانی که می خواهیم یک ربات ساده را طراحی کنیم متوجه می شویم خداوند
چه دقت و قدرتی در آفرینش جهان و موجودات داشته است بسیاری از آنچه که
او خلق کرده و در اطراف ما قرار دارد و روزانه با آن سر و کار داریم را
حتی نمی بینیم
در ربات های ساده تر مانند رباتهای ماز و یا دنبال کننده خط از
سنسورهای مادون قرمز استفاده می شود طرز کار این گونه سنسورها بدین
گونه است که ابتدا نور مادون قرمز به سمت مانع فرستاده شده و پس از
بازتاب از سطح جسم به فتو دیود گیرنده می رسد و در نهایت تشخیص می دهد
که آنجا مانع وجود دارد یا خیر.
حال اگر جسم شیشه ای باشد یا به طور عمود نور به سمت مانع ارسال نشود
یا اینکه اصلا جسم تیره باشد بازتاب آن را نخواهیم داشت در نتیجه مدار
مانع را تشخیص نمی دهد اما این مورد برای برخورد یا عدم برخورد به شیء
است و این مسابقه دقت بیشتری را می طلبد به همین علت می توان از
سنسورهایی با دقت بالاتر مانند Ultrasonic استفاده نمود.
در اینجا تشخیص شکل و البته رنگ هم وجود دارد که ربات برای برداشتن آن
باید بداند تا چه اندازه باید بازو را به شیء نزدیک کند همچنین ما
اینجا یک لب تاپ کامل بر روی ربات سوار کرده ایم پس می توانیم از
امکانات بیشتری برحوردار باشیم.
فاصله که تشخیص داده شد نوبت می رسد به تشخیص فشار! به طور کلی به
سنسورهای تماس و فشار Touch and Pressure sensors گفته می شود.
به طور کلی برای شبیه سازی حس لامسه انسان از سنسورهایی استفاده می شود
که برای درک لمس و فشار مورد استفاده قرار می گیرند. ربات برای اینکه
برای گرفتن شیء چقدر باید به آن نیرو وارد کند کاری که ما همه روزه
بدون این که متوجه باشیم انجام می دهیم باید از این سری از سنسورها
استفاده کند.
این سنسورها در رباتها برای اعمال نیروی کافی برای بلند کردن جسمی از
روی زمین و قرار دادن آن در جایی مناسب استفاده می شوند درست مانند این
مسلبقه.
جالب است بدانید که مسابقه ای وجود دارد که در آن ربات ها باید اشیاء
مختلفی را بلند کنند از یک کمد گرفته تا یک تخم مرغ !
ما در زندگی روزمره بدون اینکه حتی فکر کنیم تشخیص می دهیم که مثلا اگر
کمی بیشتر موقع بلند کردن تخم مرغ نیرو وارد کنیم می شکند و یا برای
بلند کردن صندلی چقدر انگشتانمان را به چوب فشار دهیم که هم بلند شود و
از دست ما نیفتد و هم انگشتانمان را بیش از حد فشار ندهیم این کار ها
را به طور صحیح انجام می دهیم.
اما زمانی که می خواهیم یک ربات ساده را طراحی کنیم متوجه می شویم
خداوند چه دقت و قدرتی در آفرینش جهان و موجودات داشته است بسیاری از
آنچه که او خلق کرده و در اطراف ما قرار دارد و روزانه با آن سر و کار
داریم را حتی نمی بینیم .
اگر با این دید یکبار دیگر به فیلم نگاه کنید از آن لذت بیشتری خواهید
برد:
دانلود فیلم مرحله سوم
----------------
فائزه سیدخاموشی
بخش دانش و زندگی تبیان
--------------------------------------------------------------------------------
منابع:
Robocup.org/rules
“A robot in every Home" BY GRANT WOOD; ALL RIGHTS RESERVED BY THE
ESTATE OF NAN WOOD GRAHAM; "LICENSED BY VAGA, NEW YORK, N.Y., AND
SUPERSTOCK, INC.; MODIFIED BY KENN BROWN
ifr.org
roboticsonline.com
|












