

برای شروع یک مجموعه لینک خدمتتان ارائه می دهم که اطلاعات بسیار کاملی در آن نهفته
است.
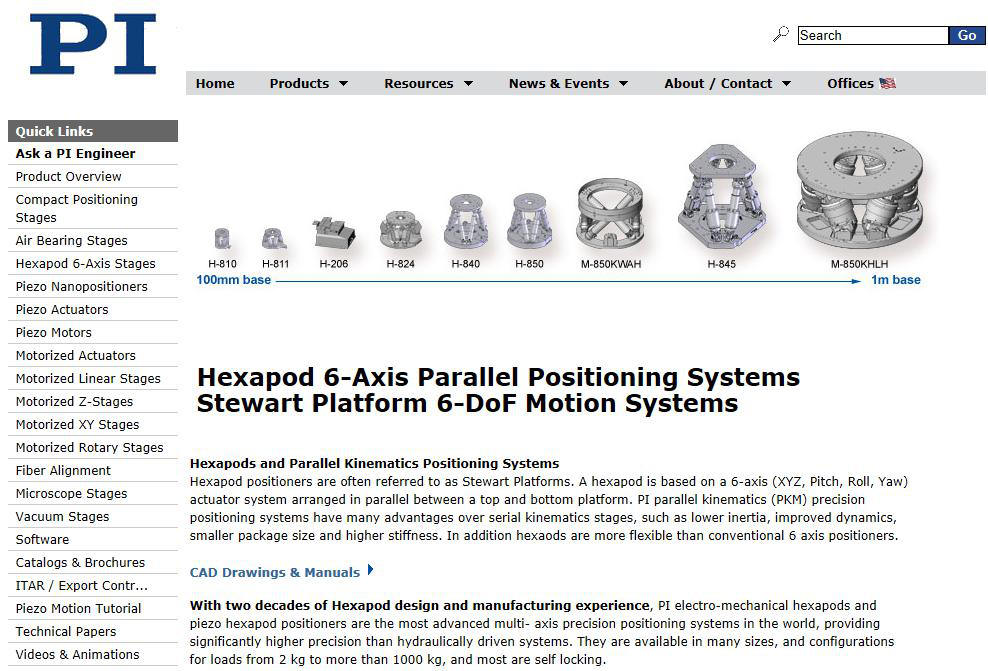
http://www.pi-usa.us/products/Micropositioning_Stage_Hexapod/hexapod-6-axis-stage.php
http://www.heos717.com/e-rate-dat2-50a.html
http://www.acutronic.com/us/products.html
http://www.ixblue.com/products/multi-axis-position-and-rate-tables
http://www.acuitas.ch/products/rate-tables/
http://www.space-electronics.com/Products/3AxisMotionSimulator.php
http://www.cranfieldprecision.com/three-axis-rate-table.php
http://www.actidyn.com/products/motion-simulation-and-control/dual-and-tri-axis-motion-simulators/st2500/
http://www.agdavis.com/rotary_multple_axis_.htm
http://www.waldytech.com/acutronic
http://www.acuitas.ch/
http://www.ixblue.com/products/hwil-flight-and-target-motion-simulators
http://www.acutronic.com/us/products/detail/view/dual-target-motion-simulator-t-304.html?
http://www.ideal-aerosmith.com/motion/flight-motion-simulation
http://www.globalspec.com/learnmore/motion_controls/positioning_stages_slides_guides/motion_simulators
http://article.wn.com/view/2015/03/13/MTS_Systems_Announces_New_UK_Research_Facility_to_Accelerate/
http://www.boschrexroth.com/en/xc/industries/machinery-applications-and-engineering/motion-simulation-technology/index?gclid=CNv3y7HuwcYCFQXJtAodOu0Pig
http://www.globalspec.com/FeaturedProducts/Detail/iXBlueInc/1_2_or_3_Axis_Positioning_and_Rate_Table_System/65839/0
http://www.aerotech.com/product-catalog/motion-simulator.aspx
http://www.motiondynamic.com/v5/content.php?content=news
http://www.moog.com/products/simulation-tables/
http://www.ideal-aerosmith.com/motion/motion-simulation-test-systems
http://www.aerotech.com/industries-and-applications/militaryaerospace/complete-system-capability.aspx
http://patech.kr/design_2015/product/product_list.php?sec_category=37
http://www.globalspec.com/ds/6114/areaspec/type_single_axis_rate_table
http://www.draper.com/inertial_instrument_test_facilities.html
http://www.space-electronics.com/Products/Products.php
http://www.legoengineering.com/real-world-engineering-using-the-nxt-for-earthquake-simulation/
http://www.moog.com/products/simulation-tables/electric-simulation-table-with-tilt/
http://heos.en.alibaba.com/product/60110988959-215265164/DZT2_50B_2_axis_rotation_table_rate_table_motion_simulator.html
http://www.aerotech.com/product-catalog/motion-simulators/three-axis-motion-simulators.aspx
http://www.aerotech.com/product-catalog/gimbals-and-optical-mounts.aspx
http://www.aerotech.com/product-catalog/motion-simulators/arms-260.aspx
http://www.whirlybird.in/rate.html
http://www.pi-usa.us/news/news_ka.php
http://www.directindustry.com/industrial-manufacturer/tilting-rotary-table-84443.html
http://www.pi-usa.us/products/Micropositioning_Stage_Hexapod/hexapod-6-axis-stage.php
http://www.newport.com/Advanced-Motion-Solutions/993909/1033/content.aspx
http://www.aerospace-technology.com/contractors/training/axis/
سایتهای بسیار متونعی در خصوص سیمیلاتورهای صنعتی
سمیلاتور به سه بخش تقسیم می شود. یک مدل آن کامپیوتری است و شبیه همین بازیهای
رایانه ای است.
مدل دوم را می توانید در شهربازی ها و سینماهای سه بعدی ببینید
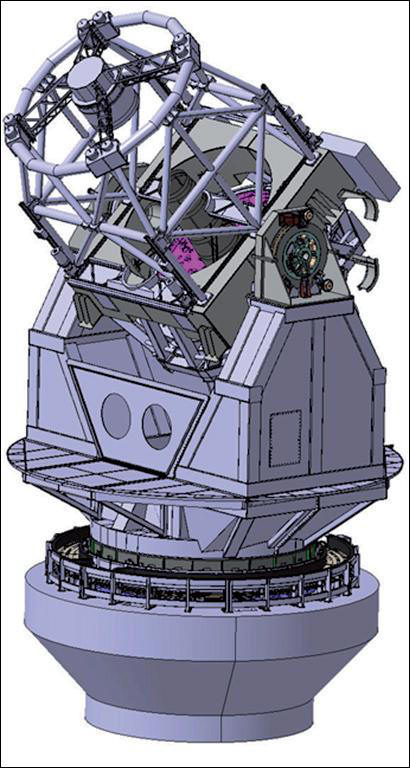
مدل سوم که از نوع صنعتی می باشد و بیشتر کاربرد نظامی دارد مورد بحث امشب ما است.
در ابتدا چند مطلب را از سایتهای هواپیمایی در خصوص سیمیلاورها بیان می کنم. این
مطالب جالب است.
شبیهسازهای پیشرفتهی امروزی توسط شركتهای هواپیمایی به كارخانجات سازنده به
صورتی سفارش داده می شود که شكل و قرار گرفتن سوییچها و نشاندهندهها در جایگاه
خلبان و بر حسب كارایی واقعی و PERFORMANCE هواپیمای مربوط به آن می باشد.
قیمت یك شبیه ساز پیشرفته به طور معمول حدود 35-30 میلیون دلار است. شبیهساز، یك
هواپیمای ثابت بوده كه مانند هواپیما پرواز كرده و حتی در بعضی مواقع خلبانان
فراموش می كنند كه با شبیهساز در حال پرواز هستند زیرا همه چیز حقیقی به نظر می
رسد. این دستگاه حول 6 محور، دائم در حال حركت بوده و صدای موتورها در داخل جایگاه
خلبان مشابه هواپیما است. شبیه ساز می تواند در شرایط مختلف جوی و در تكانهای كم و
زیاد رعد و برق پرواز كند.
شبیهسازهای نوین امروزی درست مانند هواپیما پرواز می كنند. به خصوص تمام مانورهای
پروازی كه انجام آن با هواپیما عملی نبوده و خطرناك است در شبیه ساز به راحتی انجام
می شود. این دستگاه در اثر اشتباه خلبان در مانورهای خطرناك، می تواند سقوط كرده و
از ادامه پرواز باز بماند. و فقط در صورتی که كلیدی دیگر، در كامپیوتر معلم خلبان
فعال شود شبیهساز دوباره به وضع عادی برمیگردد. به علت اثرات روانی سانحه، معلم
خلبان می تواند سوییچ دیگری در كامپیوتر خود فعال کند تا از وقوع سانحه جلو گیری
كند و در این صورت شبیه ساز دیگر سقوط نخواهد كرد.
هنگامی که سوییچ Freeze كه در كامپیوتر معلم خلبان تهیه شده فعال بشود شبیهساز در
هر وضعی كه بوده در همان حالت متوقف میشود و معلم خلبان می تواند تمام اشتباهات را
مطابق دستگاههای نشان دهنده به خلبان و كمك خلبان توضیح دهد و پس از آن می توان
دوباره به پرواز ادامه داد.
با شبیه ساز می توان به راحتی برای تمرین نشستن و بلند شدن و پرواز در شب، حتی با
دید كم و باد شدید از سمتهای مختلف، برنامهریزی كرد و برای صرفهجویی در وقت می
توان موقعیت شبیهساز هواپیما را تغییر داد و در نزدیک باند پرواز و یا در چند
ثانیه آن را در ارتفاع 35000 پا و در سرعت دلخواه قرار داد. در این ارتفاع تمرین
مانورهای مربوط به ارتفاع كه ممكن است به علت كار نكردن سامانه تهیه فشار داخل
كابین ایجاد شود انجام داد.



یکی از مزایای دستگاه شبیه ساز هزینه پایین آن نسبت به آموزش با هواپیما است به
طوری که قیمت یك ساعت پرواز آموزشی با هواپیما 747.B در حدود 12000 دلار و در حالی
كه قیمت یك ساعت شبیه سازاین هواپیما 500 دلار است. تعداد قابل توجهی از مانورها
وجود دارد كه انجام آنها در هواپیما امكان پذیر نبوده و بسیار خطرناك هستند و باید
این تمرین ها را در شبیهساز انجام داد. در سالهای قبل از 1950 به علت كم بود شبیهساز
هواپیماهای مسافربری مقدار زیادی از تعلیمات پروازی با هواپیما انجام میشد. آموزشی
و به معنی واقعی آن انجام نمیشد.

ahmad shokhmgar, [۰۸.۰۲.۱۶ ۲۳:۱۷]
[ Photo ]

ahmad shokhmgar, [۰۸.۰۲.۱۶ ۲۳:۱۷]
ایمنی پرواز با به كار گیری شبیه ساز، به همراه سامانه Vision، به بالاترین درجه
خود رسیده است. دستگاه VISION جلوی شبیه ساز نصب شده است و توانایی خلق تصاویر
واقعی پرواز مانند؛ فرودگاه، باند پرواز، ترمینال و ساختمان های اطراف آن، کوه ها و
موانع طبیعی و ایجاد محدودیت های طبیعی دید پروازی شامل ابر، مه و ... را به صورت
واقعی در تمامی فازهای پروازی ایجاد نماید.

شبیهساز پرواز برای هر هواپیمایی متفاوت است. این اتاقک برای هواپیمای ایرباس،
کابینی با دو متر و 70 سانتیمتر عرض، سه متر طول و دو متر ارتفاع است. در حال حاضر
در شبیهساز پرواز هواپیمای ایرباس بیش از 120 حالت اضطراری پیشبینی شده است. در
این اتاقک، خلبان، کمک خلبان و مهندس پرواز در جایگاههای همیشگیشان مینشینند و
تمام کارهایی را که در هواپیمای واقعی باید انجام دهند انجام میدهند؛



«البته در این میان شخصی به عنوان استاد خلبان روی کارهای این سه نفر نظارت می کند
او برای محکزدن خلبان و کمک خلبان یکی از حالتهای اضطراریای را که ممکن است
هنگام پرواز واقعی برای یک هواپیما رخ بدهد به وجود میآورد تا خلبان و کمک خلبان
با قرار گرفتن در این شرایط بهترین و زیرکانهترین عکسالعمل را از خود نشان بدهند.»
اینها را حسین پیروزی میگوید. او مدتهاست که در اتاقک سیمولاتور به عنوان استاد
خلبان بر کار خلبانها نظارت میکند. به گفته او اتاقک شبیهساز پرواز یکی از آزمونهای
خلبانی است و اگر خلبانی سه بار در این آزمون رد شود برای همیشه باید از حرفه
خلبانی خداحافظی کند.


سیمولاتور به اندازه یک اتاق نقشه دارد و اگر عیبی پیدا کند متخصص آنقدر این نقشهها
را بالا و پایین میکند تا ایراد اتاقک را پیدا کند. اما در کل گرچه هزینه نگهداری
این اتاقک بالاست اما بازدهیاش عالی است و در عین حال که مهارتهای خلبان را در
مواجهه با شرایط بحرانی افزایش میدهد از میزان خطرات هوایی هم میکاهد.



ahmad shokhmgar, [۰۸.۰۲.۱۶ ۲۳:۳۳]
[ File : 6c6a4f7dcb03b857d627568274781e3f239278__41404.mp4 ]
ahmad shokhmgar, [۰۸.۰۲.۱۶ ۲۳:۵۰]
[In reply to ahmad shokhmgar]
یک فیلم جالب از کارکرد سیمیلاتور هست . البته قبلا نیز این فیلم بارگزاری شده بود
ahmad shokhmgar, [۰۸.۰۲.۱۶ ۲۳:۵۱]
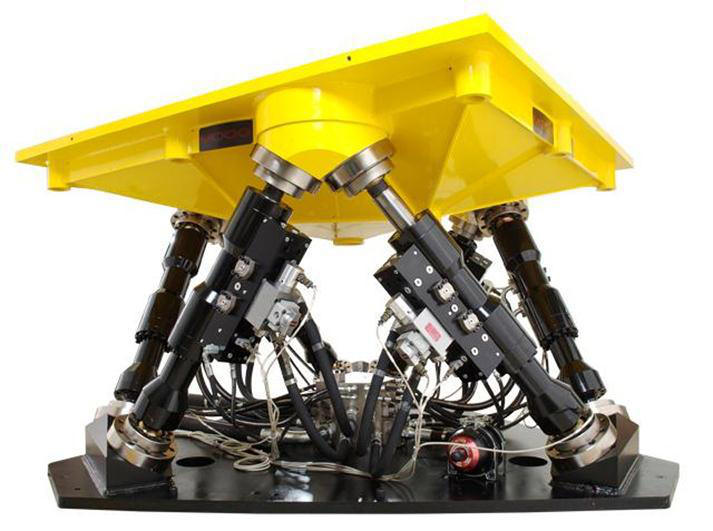
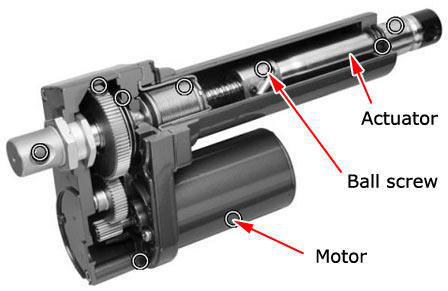
اکنون می خواهیم از پایین شروع کنیم و به بالای دستگاه برویم. در زیر همه این
سیمیلاتورها یک مکانیزم هگزاپاد کار گذاشته اند.
ahmad shokhmgar, [۰۸.۰۲.۱۶ ۲۳:۵۱]
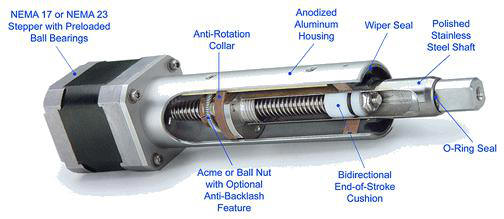
قبل از تشریح مکانیزم هگزاپاد اول المان های بازویی را شرح می دهیم.
ahmad shokhmgar, [۰۸.۰۲.۱۶ ۲۳:۵۲]
[ Photo ]
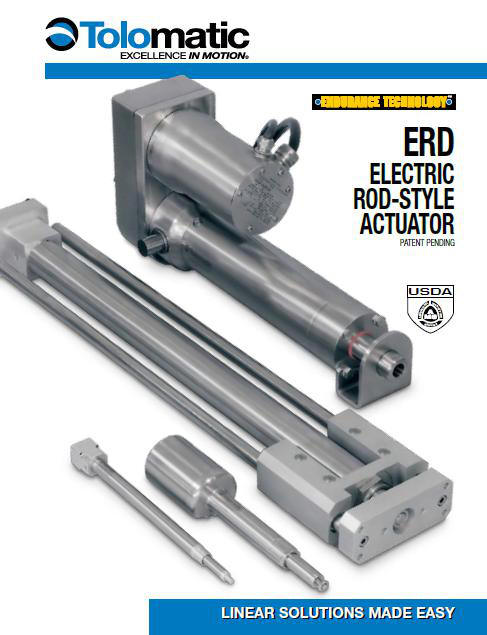
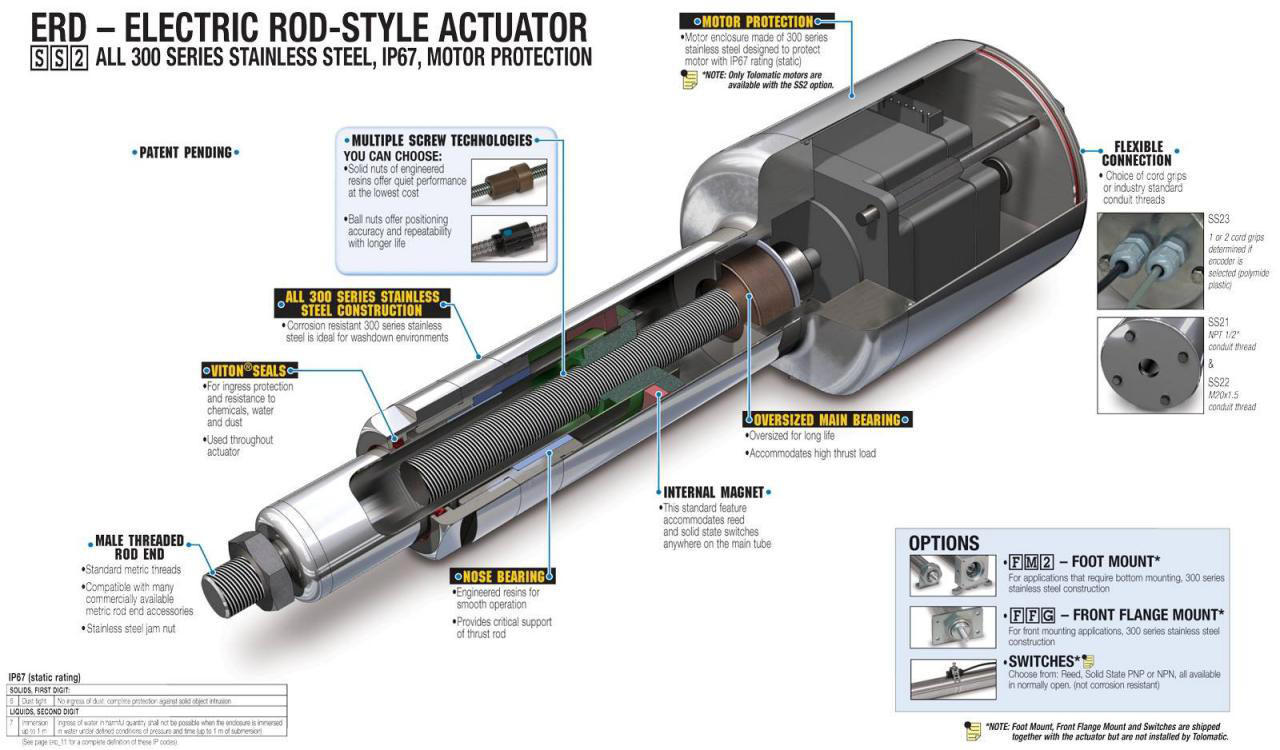
ahmad shokhmgar, [۰۸.۰۲.۱۶ ۲۳:۵۴]
[ File : 2190-4000_0503_erd-cat.pdf ]
ahmad shokhmgar, [۰۸.۰۲.۱۶ ۲۳:۵۴]
[ Photo ]

ahmad shokhmgar, [۰۸.۰۲.۱۶ ۲۳:۵۵]
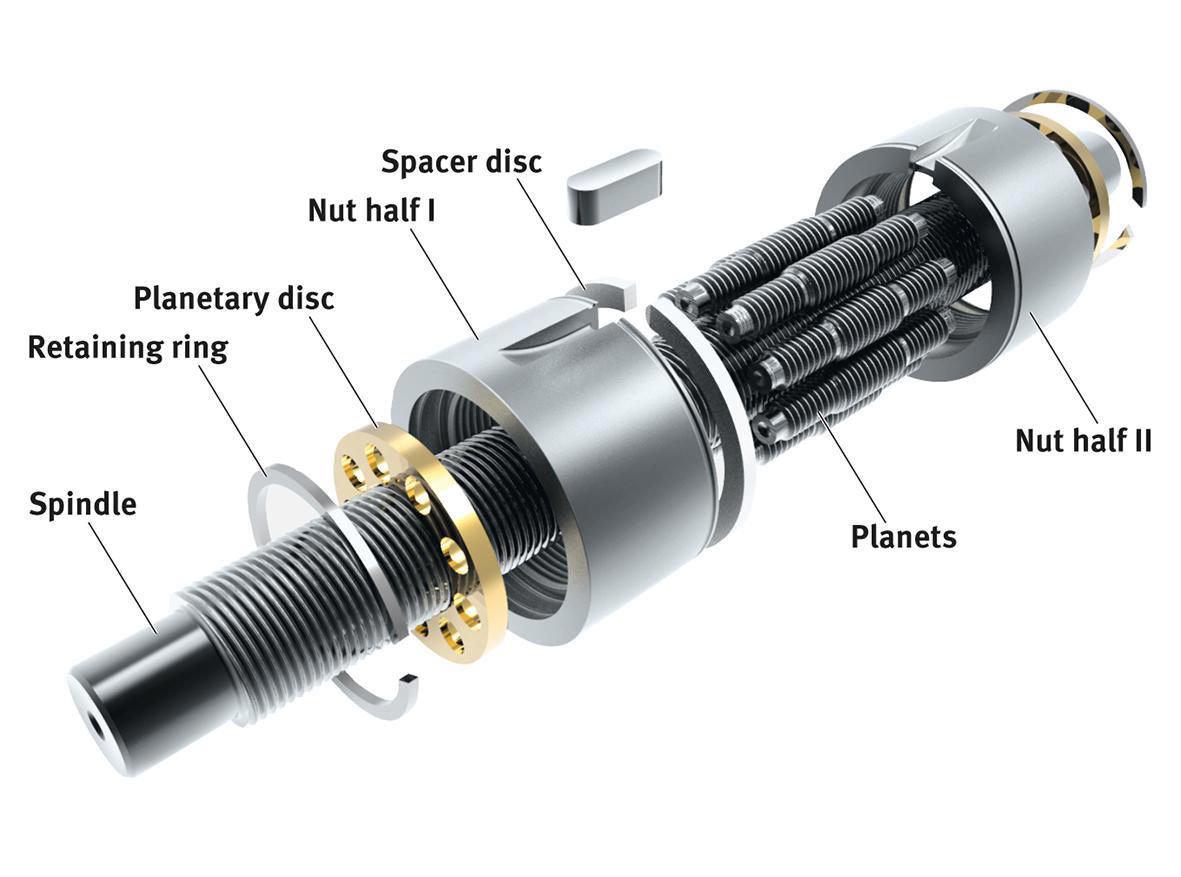
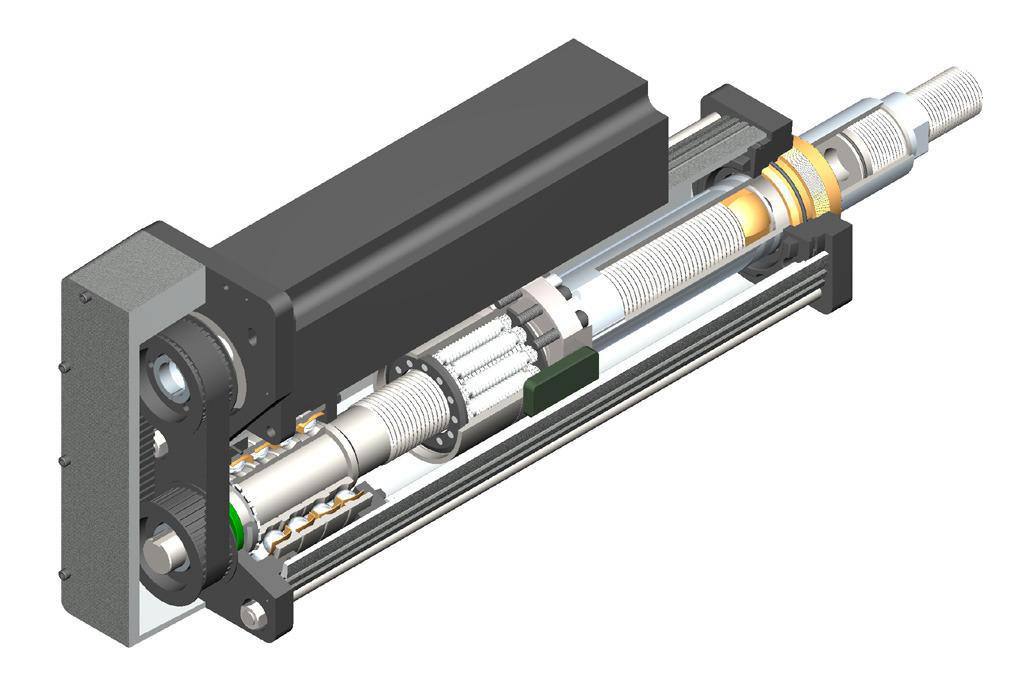
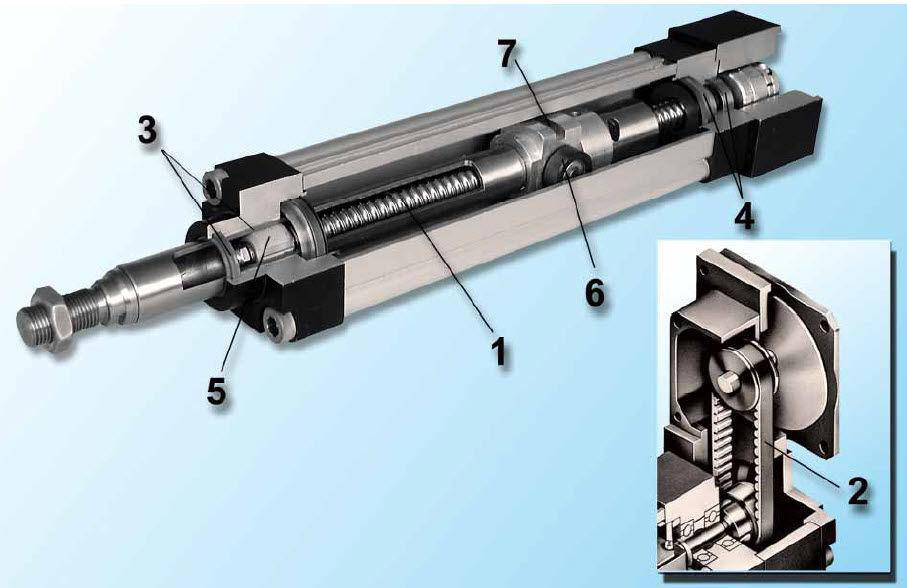
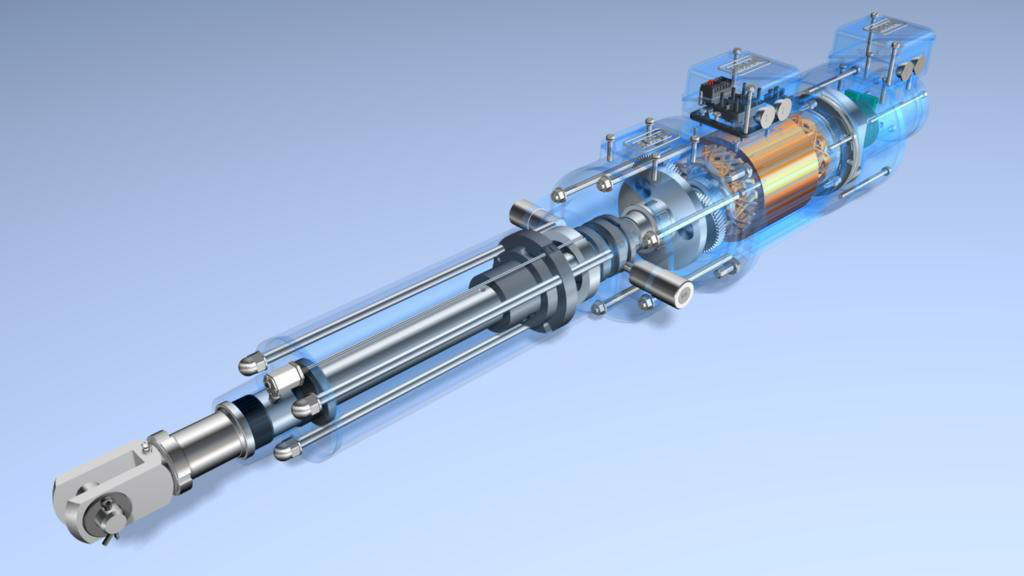
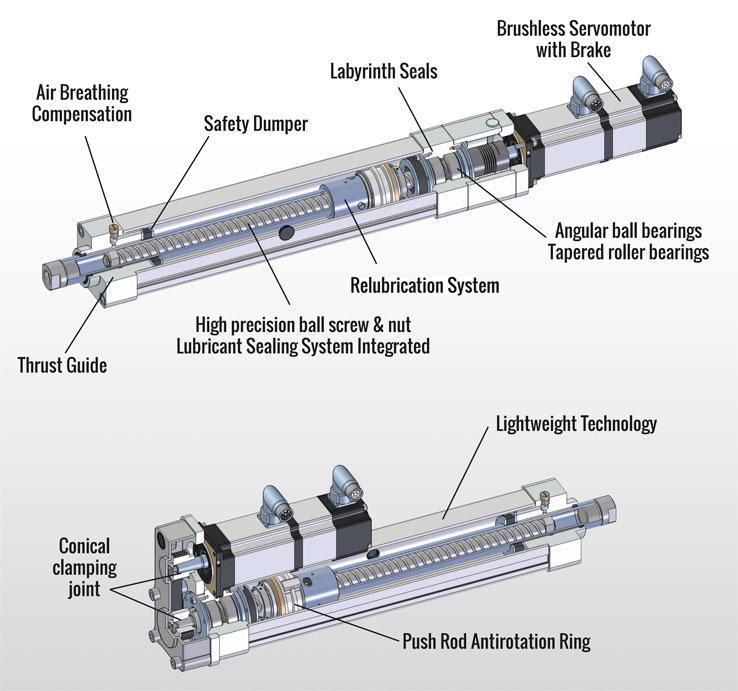
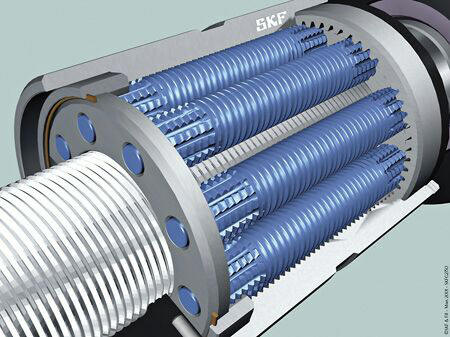
این یک مکانیزم رولراسکرو است. یک مکانیزم بسیار پرقدرت و در عین حال روان
ahmad shokhmgar, [۰۸.۰۲.۱۶ ۲۳:۵۵]
[ Photo ]
Alireza Sarayani, [۰۸.۰۲.۱۶ ۲۳:۵۶]
[In reply to ahmad shokhmgar]
تا اونجایی که میدونم مزیت این مکانیزم نسبت به بال اسکرو اینه که در حرکت های
برگشتی سریع، قبل نمیکنه. درسته؟
ahmad shokhmgar, [۰۸.۰۲.۱۶ ۲۳:۵۷]
[ Photo ]
ahmad shokhmgar, [۰۸.۰۲.۱۶ ۲۳:۵۷]
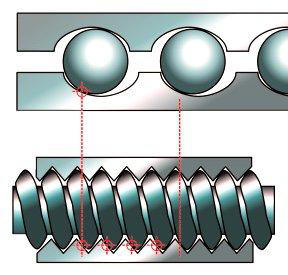
در شکل فوق دقت کنید در طول یک گام بال اسکرو که ساچه درگیر است در رولر اسکرو
تعداد بیشتری دنده درگیر است
ahmad shokhmgar, [۰۸.۰۲.۱۶ ۲۳:۵۸]
در مدل skf آن چند سال پیش دیدم در یک ساز کوچک جک بسیار قوی ساخته بودند
Alireza Sarayani, [۰۸.۰۲.۱۶ ۲۳:۵۹]
[In reply to Alireza Sarayani]
قفل نمیکنه
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۰۰]
[ Photo ]

ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۰۱]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۰۲]
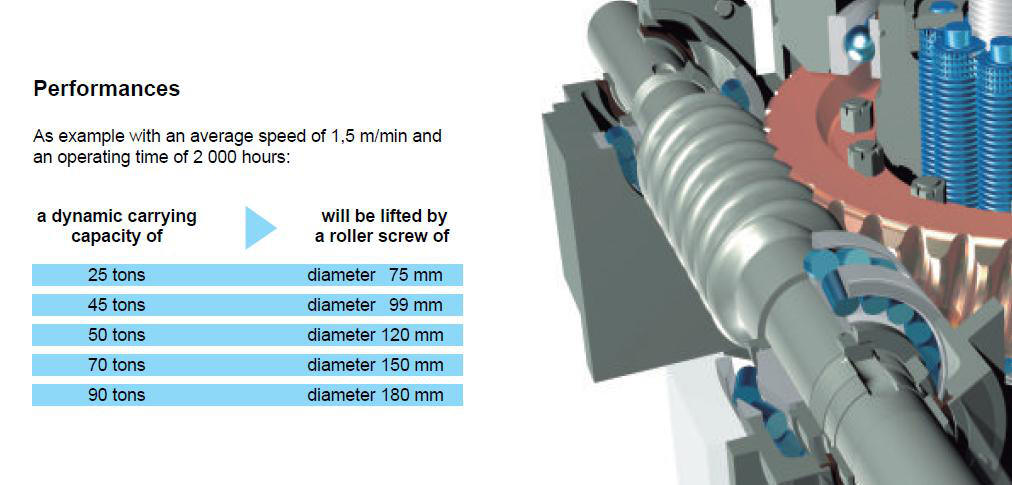
به قطر های داده شده و توان تحمل بار به تناژ دقت کنید. برای من که جالب بود.
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۰۳]
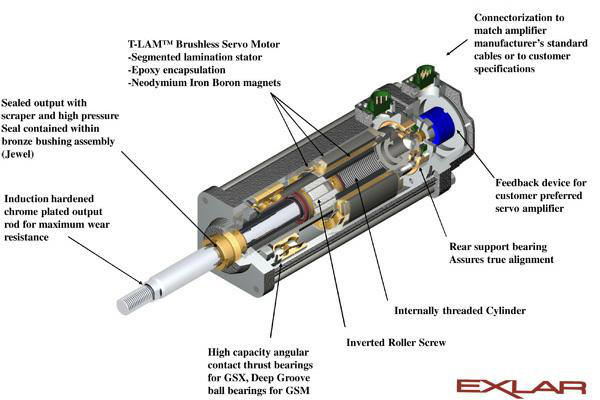
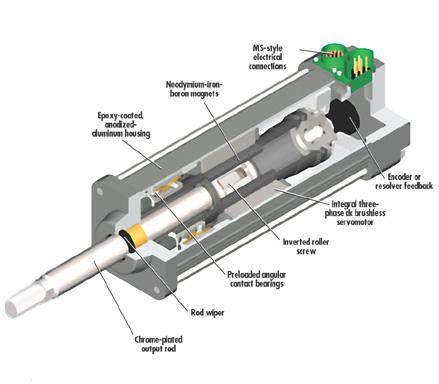
این یک مدل از محرکها بود. مدل دیگر همان بال اسکرو خودمان است.
Alireza Sarayani, [۰۹.۰۲.۱۶ ۰۰:۰۴]
[In reply to ahmad shokhmgar]
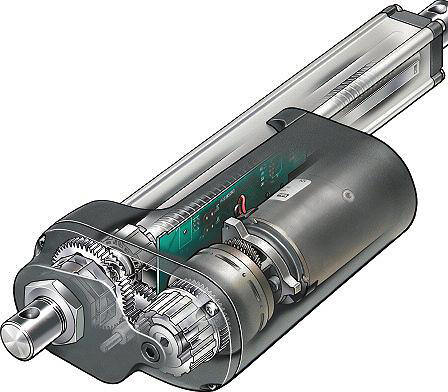
یک مدل هم فیلمش رو دیده بودم که با گیربکس و حالت لنگ بود
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۰۵]
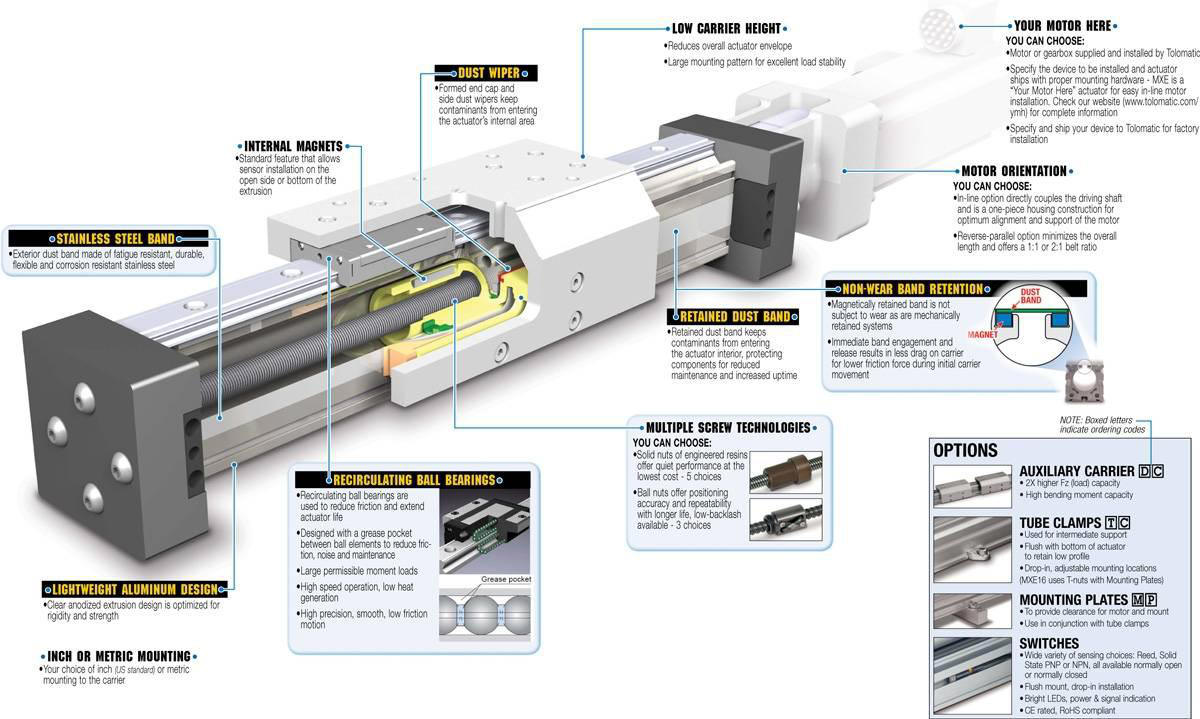
مدل زیاد است. یک مدل بال اسکرو هست که پیچ آن رزوه ندارد
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۰۸]
بیشتر کاربرد در این دستگاهها دو مدل فوق است.
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۰۹]
البته قدیم از روش جک های هیدرولیکی استفاده می کردند . بسیار پرهزینه و تعمیرات و
نگهداری بالایی داشتند.
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۰۹]
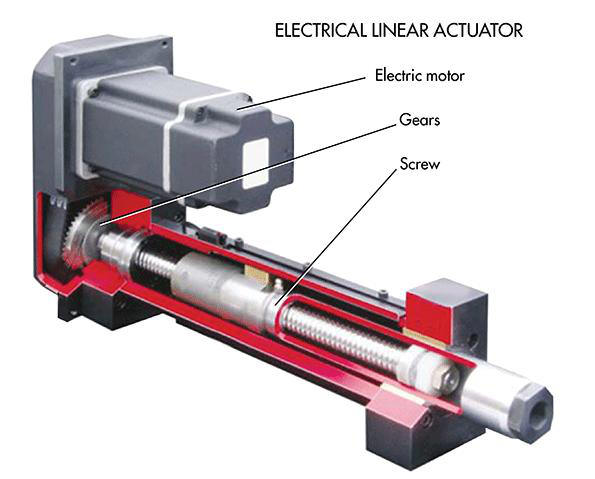
جدیدا با مکانیزم سرو و بال اسکرو جک های هیدرولیکی حذف شده اند.
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۰]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۰]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۱]
یک تعدادی عکس در این زمینه هست که برایتان ارسال می کنم
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۱]
[ Photo ]

ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۱]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۱]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۱]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۱]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۱]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۱]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۱]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۱]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۱]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۱]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۱]
[ Photo ]

ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۲]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۲]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۲]
[ Photo ]

ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۲]
[ Photo ]

ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۲]
[ Photo ]

ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۳]
[ Photo ]

ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۳]
[ Photo ]

ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۳]
[ Photo ]

ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۰:۱۴]
در مورد هرکدام از عکس های فوق اگر سوالی دارید بفرمایید.
Alireza Sarayani, [۰۹.۰۲.۱۶ ۰۰:۱۶]
سروو موتور ها باید ترمز دار باشند؟ درسته؟
نیم کره 20 سانت, [۰۹.۰۲.۱۶ ۰۰:۲۱]
[In reply to ahmad shokhmgar]
درود مهندس.
عاای بود
نیم کره 20 سانت, [۰۹.۰۲.۱۶ ۰۰:۲۱]
عالی
نیم کره 20 سانت, [۰۹.۰۲.۱۶ ۰۰:۲۲]
ساده ترین مکایزمی که دو حرکت محور Xو Y را به هم و به یک اهرم منقل کنه چی هست؟
نیم کره 20 سانت, [۰۹.۰۲.۱۶ ۰۰:۲۲]
مثلا دوتا بال اسکرو که سرهم چفت شده و یکی سوار اون یکی باشه؟
samakoush, [۰۹.۰۲.۱۶ ۰۶:۱۰]
[In reply to نیم کره 20 سانت]
یه چیز در بازار هست به نام لاینر استیج.
یک ماژول آماده هست که بر روی آن لیزر نصب می شود.
شما به انگلیسی سرچ کنید لاینر استیج متوجه می شوید منظور بنده چیست.
////////////////////////////////////////////////////////////////////////////////////////////
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۳]
ببخشید آنقدر خسته بودم پای کامپیوتر خوابم برد
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۳]
ادامه مبحث دیشب .
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۵]
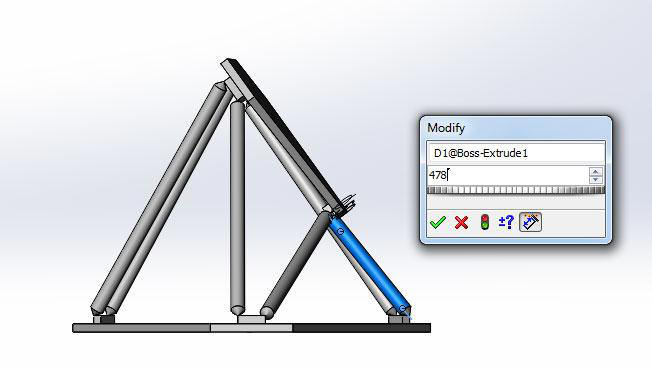
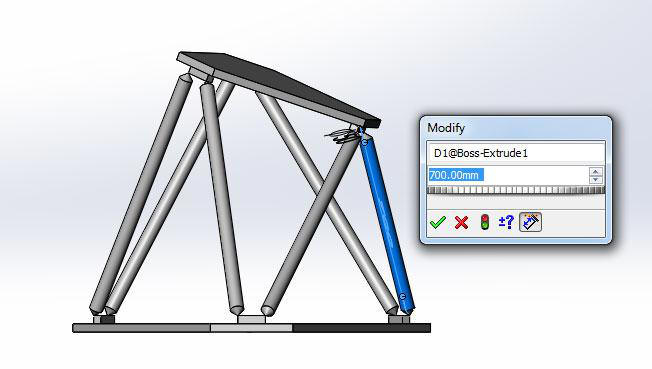
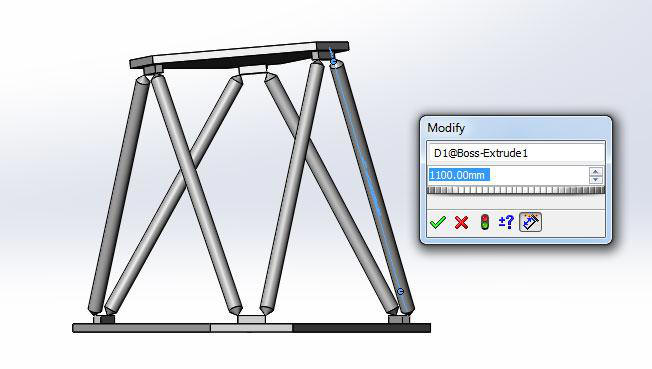
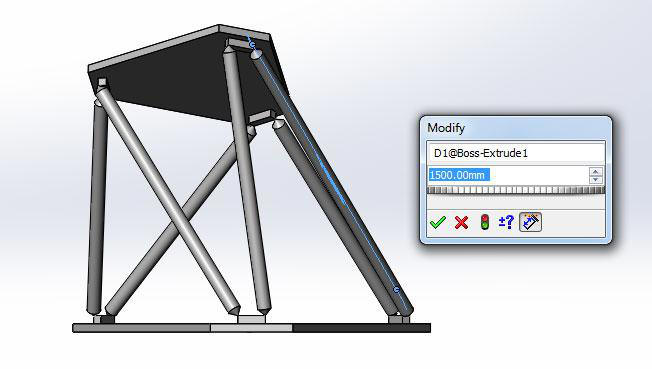
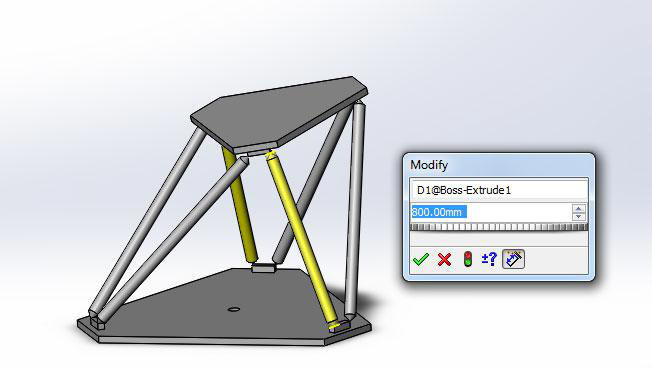
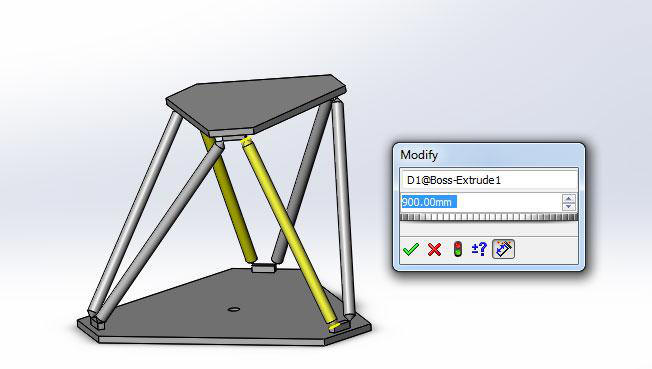
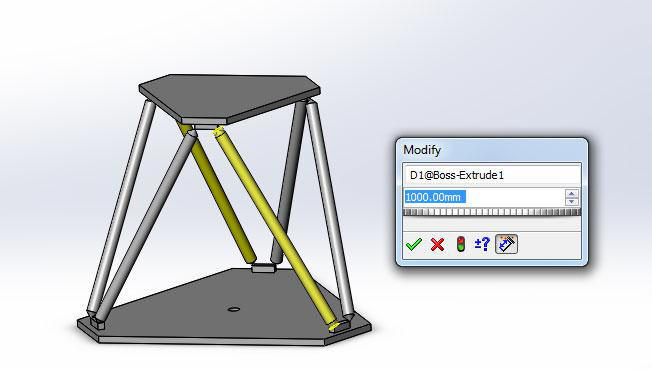
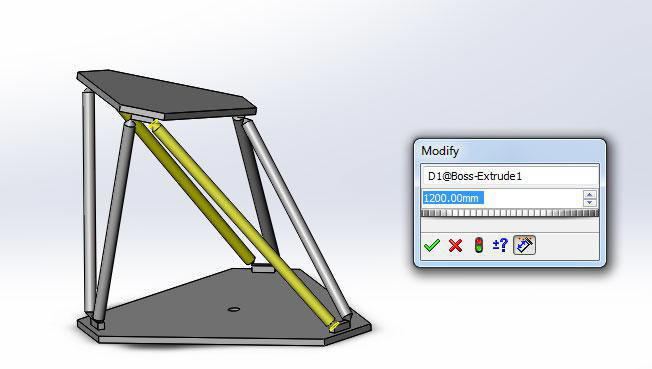
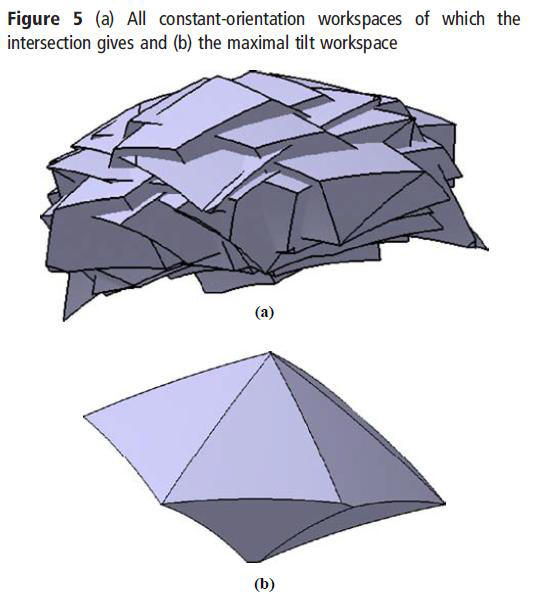
در طراحی سیمیلاتور F14 یکی از مواردی که ذهن من را شدیده بخود مشغول کرده بود
مکانیزم های فوق بود. اگر یکی از پایه ها به تنهایی کوچک و بزرگ شود حرکت چگونه
خواهد بود . اگر دوتا پایه ها کوچک و بزرگ شود چه می شود و ...
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۶]
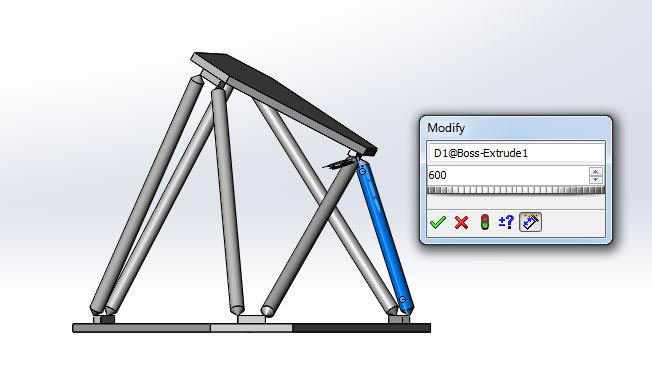
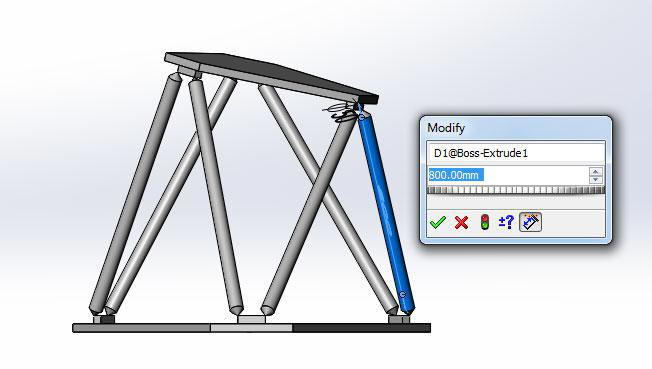
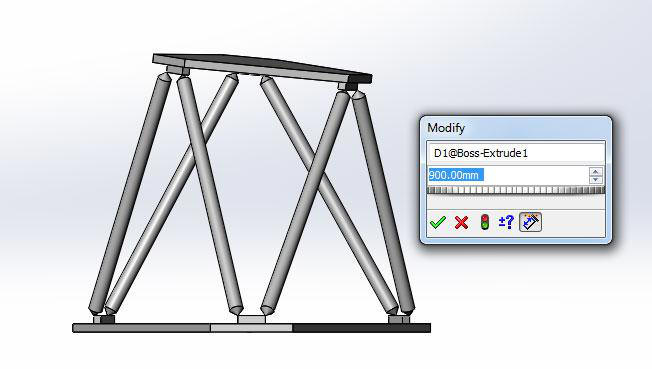
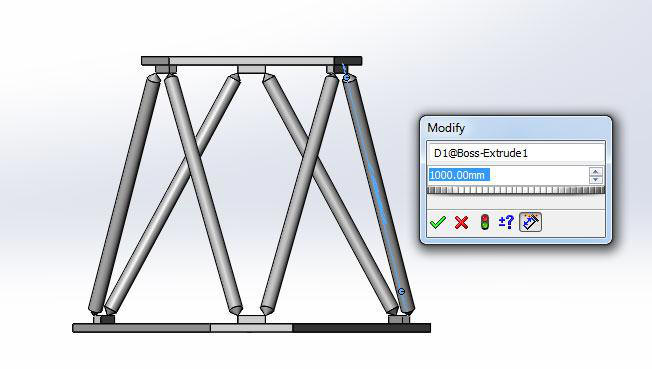
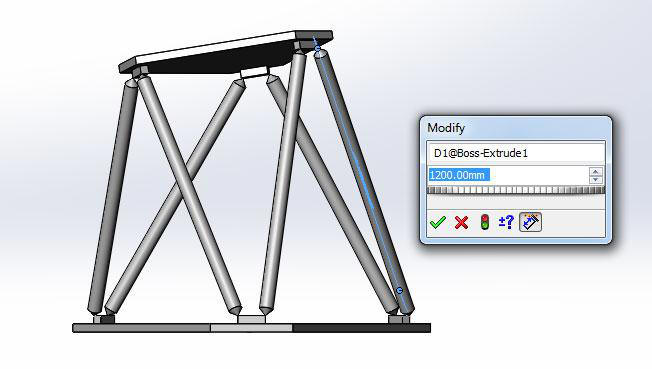
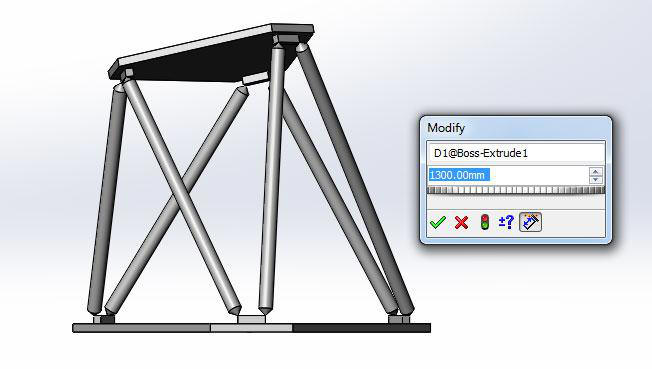
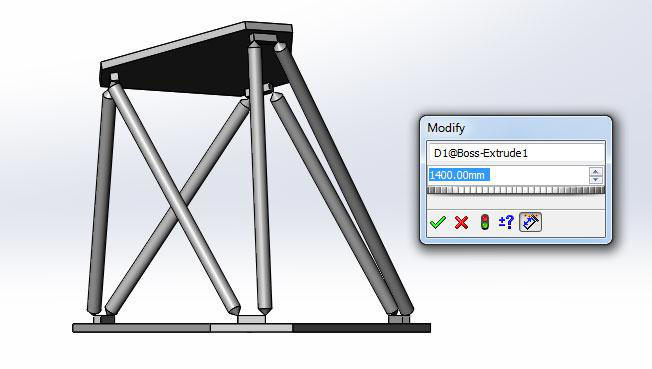
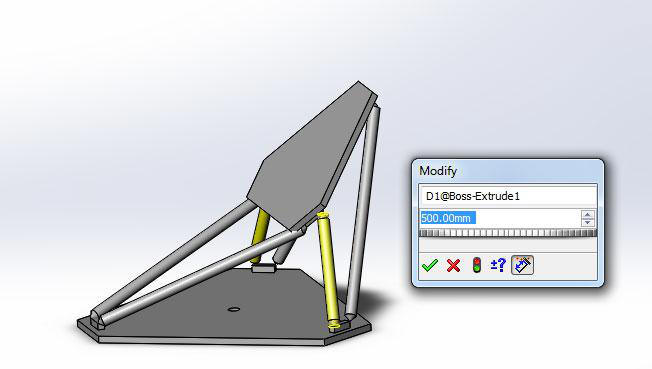
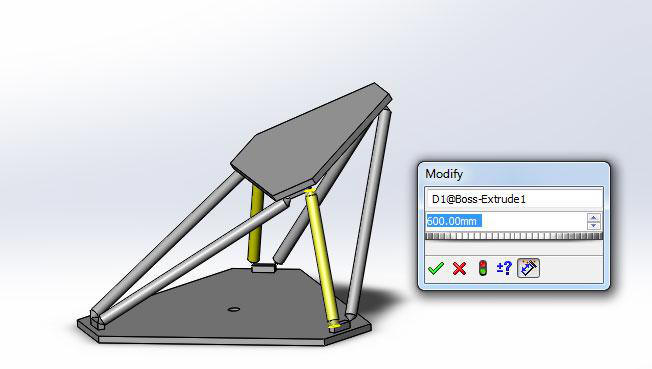
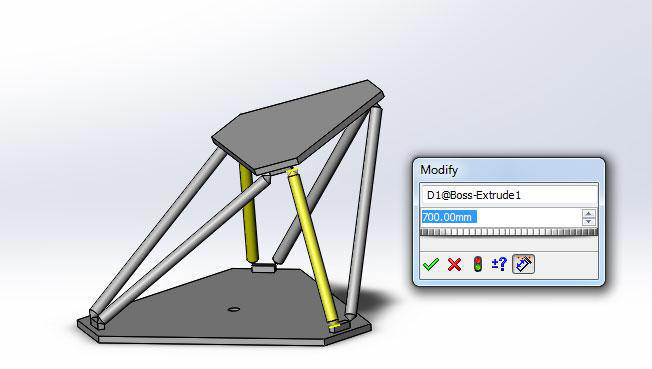
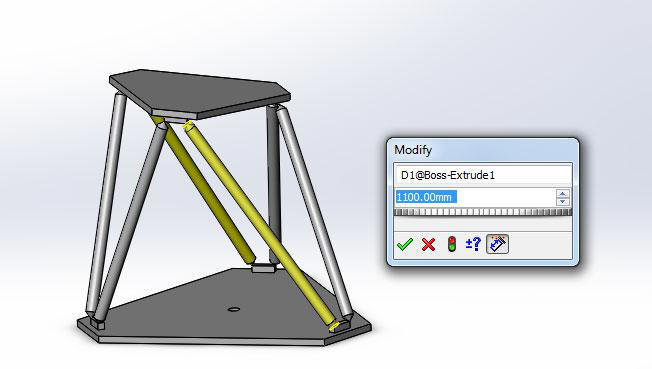
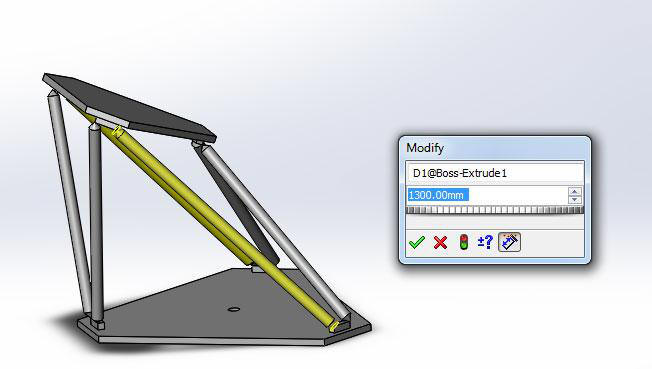
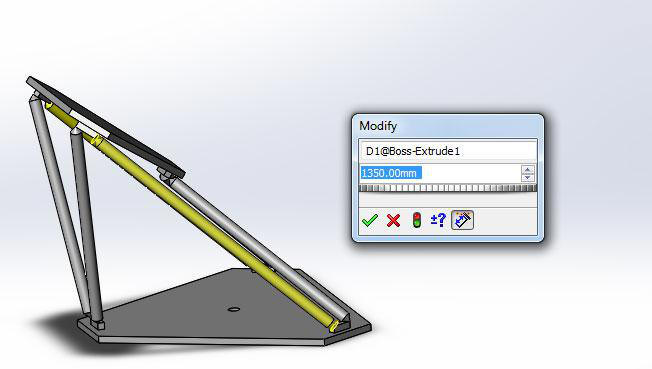
به همین دلیل در سالید ورک یک مکانیزم ساده کشیدم و شروع به تغییر سایز در سه حالت
دادم . عکس های جالب زیر بوجود آمد. پایه رنگی پایه دارای تغییر طول است.
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۶]
[ Photo ]
samakoush, [۰۹.۰۲.۱۶ ۰۶:۳۶]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۶]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۶]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۶]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۷]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۷]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۷]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۷]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۷]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۷]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۷]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۸]
در عکس های فوق از 6 پایه فقط یک پایه تغییر طول داشت
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۸]
در عکس های زیر از 6 پایه فقط 2 پایه تغییر طول دارند
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۸]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۸]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۸]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۸]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۸]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۸]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۸]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۸]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۸]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۳۹]
[ Photo ]
samakoush, [۰۹.۰۲.۱۶ ۰۶:۴۶]
[ Video ]
samakoush, [۰۹.۰۲.۱۶ ۰۶:۴۶]
[ Video ]
samakoush, [۰۹.۰۲.۱۶ ۰۶:۴۷]
[In reply to samakoush]
مکانیزم دلتا
samakoush, [۰۹.۰۲.۱۶ ۰۶:۴۸]
[In reply to samakoush]
یک سی ان سی هگزا کلس با 6 عدد بال اسکرو
samakoush, [۰۹.۰۲.۱۶ ۰۶:۴۸]
[ Video ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۵۰]
[ File : HEXAPOD4-1.avi ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۵۱]
[ File : Olsen Engineering - Roller Screw Linear Actuators.flv ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۵۳]
نکته مهم دیگری که در این بازوها وجود داشت نحوه کنترل حرکت آنها بود. اینکه یک
پایه را حرکت دهی چه می شود مهم نبود. اینکه به یک حرکت مورد دلخواه برسیم باید چه
پایه هایی و چگونه حرکت کنند مهم است
M Alizadeh, [۰۹.۰۲.۱۶ ۰۶:۵۸]
بنام حضرت دوست...
اطرافم پر دوست
دوستانم،گهري بي همتا
امروز روزمهرخدا...
به درودي دل خود گرم کنيم.
و چه زيباست، کنار ياران،
خنده بر صبح زدن
زندگي را به صعود و
به خوشي چسب زدن
تا که باشيد شما
زندگي بستر امنيت و اظهار خوشيست
پس کنارهم باشيد،
چون که يک دست ندارد آوا
سلام
صبح سه شنبه بخير
روزتان نيکو
زندگیتان زيبا
دلتان پر نشاط
تا جایی که توان دارید تلاش کنید:
برای عشق، برای رفاه، برای امنیت.
و در آخر می بینید که أصلا و أبدا تلاشهایت بی فایده نبوده است.
امید آن دارم امروزتان در کنار خانواده، دوستان وسایر عزیزان پر از شادی و آرامش
سپری شود.
یا علی مددد
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۶:۵۸]
یعنی نرم افزارهایی که حرکت نهایی را برای ما تبدیل به حرکت محورها نمایند همام CAM
در سی ان سی های معمولی
samakoush, [۰۹.۰۲.۱۶ ۰۶:۵۹]
[In reply to ahmad shokhmgar]
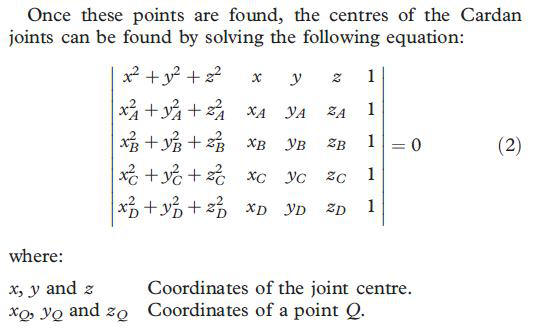
ببخشید در بحث ورود میکنم.
اما یک ماتریس ژاکوبین شش درجه آزادی،
تقریبا به قائده یک برگه آچار سایز این ماتریس است،
جالب اینجاست که برای ضرب این ماتریس در پردازنده، عملا پردازنده ها دچار درگیری
شدید می شوند و کار هر پرسسوری نیست،
ازین رو با تکنیک های ریاضی حجم محاسبات را میشکنند تا بتوان به پردازش سبکتر اما
دقیق برسند.
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۰۰]
[ Photo ]

ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۰۱]
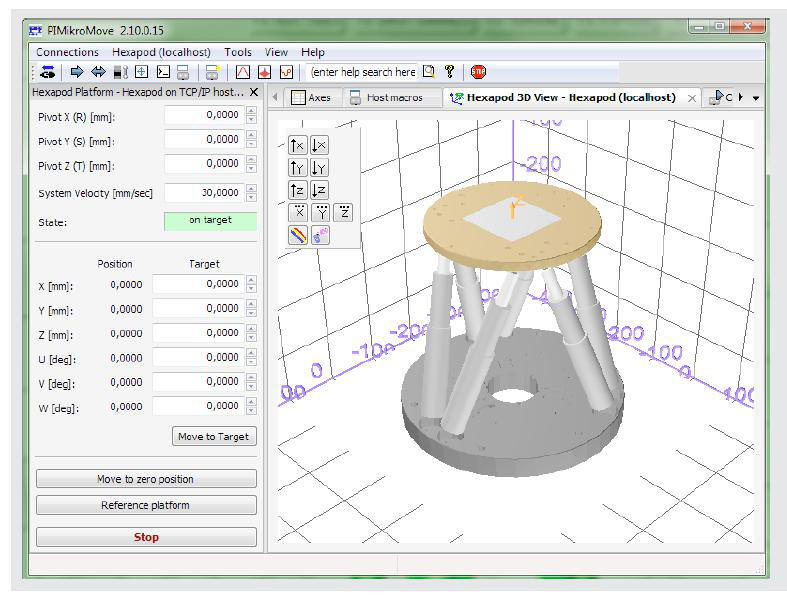
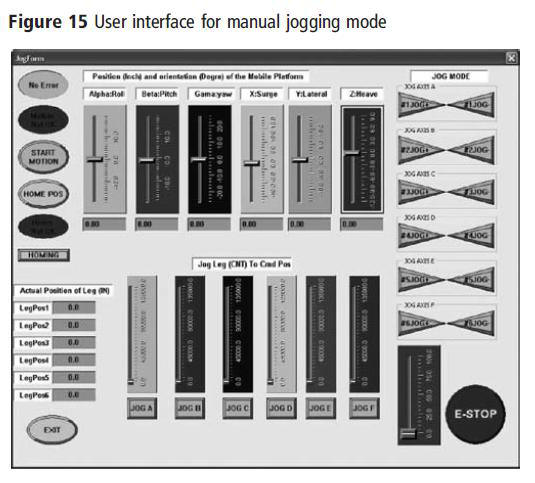
فایل pdf زیر یک راهنما جهت ورود به این دنیا می باشد
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۰۲]
[ File : TEC11_Software_Hexa_EN_120523.pdf ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۰۲]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۰۴]
[ File : H-840_UserManual_MS201E110.pdf ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۰۴]
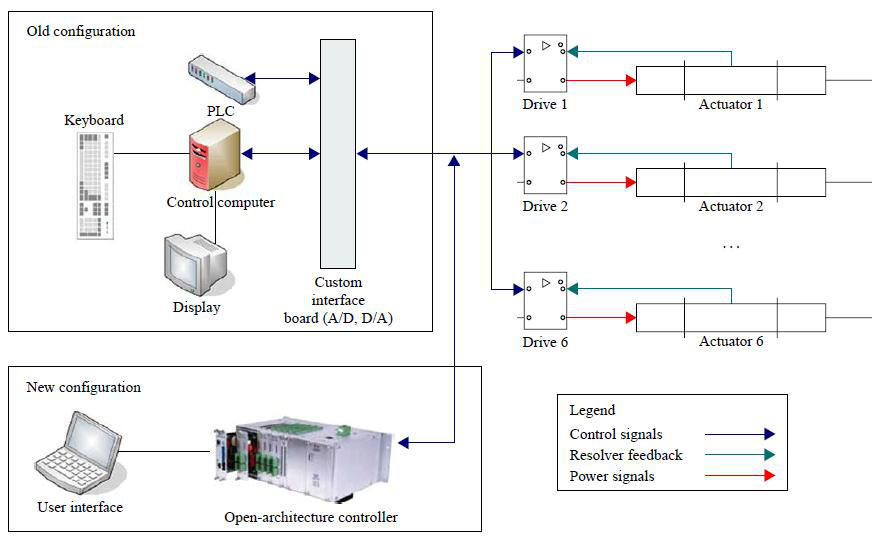
نکته بعدی کنترلر مخصوص این دستگاهها بود
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۰۵]
خیلی از عزیزان در چنین مواقعی شروع به کشف و ... می کنند. تیم تشکیل می دهند
الکترونیک و ... راه می اندازند اما تجربه به من نشان داده که خیلی از چیزها که من
نمی دانم خیلی ها عمرشان را صرف آن مورد ها کرده اند
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۰۶]
[ Photo ]

ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۰۷]
[ Photo ]
samakoush, [۰۹.۰۲.۱۶ ۰۷:۰۷]
[In reply to samakoush]
بعد از اینکه توابع و روابط بازوها پیدا شد، تازه اول کار است.
چون در این حالت تازه شما توان ورود به مود کنترل تناسبی(سیستم قطع و وصلی ساده) را
دارید،
اگر بخواهید وارد دنیای pid(پروپرشنال،اینتگرال،دیفرنشیل) شوید، تعداد ماتریس هایی
که پردازنده باید در هم ضرب کند بسیار بزرگ میشود، و در زمان بسیار کوتاه(چند میلی
ثانیه) باید این کار را انجام دهد، و عملا سخت افزار های گران قیمت را می طلبد.
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۰۸]
Related Products
H-810 6- Axis Miniature Hexapod
H-811 6- Axis Miniature Hexapod
H-824 6- Axis Hexapod
H-840 6- Axis Hexapod
H-850 6- Axis Hexapod
H-206 6- Axis Precision Alignment System
H-820 6- Axis Positioner with Controller
Technology
Hexapod- Specific Software from PI | Due to their parallel kinematic structure,
Hexapods necessitate a particularly
complex control system. Learn more ...
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۰۹]
[In reply to samakoush]
مهندس جان بی خیال اول صبحی ، همه چیز آماده هست. کنترلر، نرم افزار، موتور
اکچیویترها . ما فقط یک صفحه تخت لازم داریم و چند تا اتصالات.
samakoush, [۰۹.۰۲.۱۶ ۰۷:۱۳]
[In reply to ahmad shokhmgar]
حرف شما کاملا صحیحه،
دقیقا قرار نیست از اول کسی بیاد کامپیوتر را اختراع کند،
اما حداقل دانستن مطالب پایه ای، کمک به توسعه اون میکنه.
البته اگر صرفا عادت به مصرف کننده بودن نکرده باشیم.
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۱۴]
[In reply to samakoush]
شوخی کردم تا در ذهن دوستان ماندگار بشه. شما که من را می شناسید.تا ته ته ته یه
چیز رو در نیارم فکرم آروم نمی شه . اصل کار هم همین است. دانش باید ریشه داشته
باشد.
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۱۵]
لطفا ادامه دهید من هم در ادامه بحثم به ماتریس های گفته شده شما می رسم. ممنون
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۱۹]
[ File : H-840_UserManual_MS201E110.pdf ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۲۰]
[ File : PI_DataSheet_C-887_42139.pdf ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۲۰]
[ File : PI_DataSheet_H-811_S11_42033.pdf ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۲۰]
[ File : PI_Datasheet_H-820_20150922_LTr.pdf ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۲۰]
[ File : PI_DataSheet_H-840_42114.pdf ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۲۲]
[ Photo ]

ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۲۵]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۲۶]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۲۷]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۲۸]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۳۰]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۳۰]
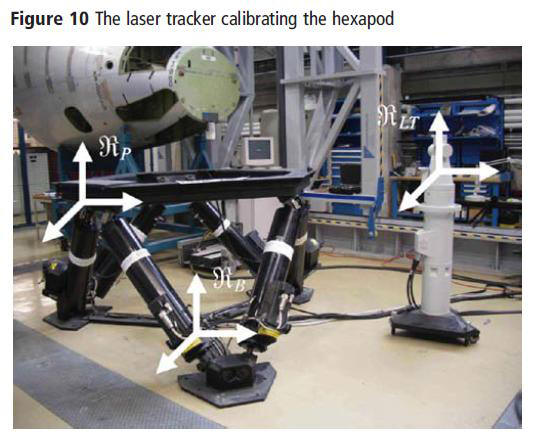
3. Calibration
A great deal of work has been done on the calibration of parallel
robots (Andreff et al., 2004; Chai et al., 2002; Daney, 2003), but,
owing to the large variety of parallel architectures, no generalized
method exists. Nearly, all these calibration methods are based on
purely kinematic models (i.e. only geometrical errors are
assumed). Obviously, every model is completely different from
one architecture toanother,but, typically, universal andspherical
joints are assumed to be perfect.
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۳۱]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۳۲]
[ Photo ]
samakoush, [۰۹.۰۲.۱۶ ۰۷:۳۲]
[ Video ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۳۳]
[ Photo ]
samakoush, [۰۹.۰۲.۱۶ ۰۷:۳۴]
[In reply to samakoush]
فیلم اون رولر اسکرو ایی که در مباحثتو گفتید،
به صدای کم سیستم توجه کنید و توضیحاتی که فرد میده جالبه.
samakoush, [۰۹.۰۲.۱۶ ۰۷:۳۵]
[ File : MWorks 8 1 with R505 setup.exe ]
samakoush, [۰۹.۰۲.۱۶ ۰۷:۳۶]
[In reply to samakoush]
اون نرم افزار پرینتر سه بعدی مربوط به سالید اسکپ که به دوستمون قول دادم.
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۷:۴۲]
یک پلتفرم استوارت رو فقط میشه از روش لاگرانژ تحلیل دینامیکی کرد
کنترل پیشخور هم بهترین کنترل برای مصارف شبیه سازیه.چون فیدبک سه جهته به ما میده
samakoush, [۰۹.۰۲.۱۶ ۰۷:۴۶]
[In reply to Mohammad Yousefi]
دو روش دیگر هم وجود دارد که در کتابی که میزارم توضیح داده شده.
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۷:۴۸]
[In reply to samakoush]
روش نیوتون اویلر چون تمام لینک ها رو به صورت جداگانه بررسی میکنه حجم محاسبات
زیادی رو دربر میگیره.پیرو اون صحبتتون که فرمودید پردازنده هنگ میکنه.ولی لاگرانژ
چون کل سیستم رو یکجا بررسی میکنه از حجم محاسبات کاهش میده
samakoush, [۰۹.۰۲.۱۶ ۰۷:۴۹]
[In reply to Mohammad Yousefi]
بله درسته
samakoush, [۰۹.۰۲.۱۶ ۰۷:۴۹]
[ File : Schilling_www.elecomputer.ir.pdf ]
samakoush, [۰۹.۰۲.۱۶ ۰۷:۴۹]
[In reply to samakoush]
کتاب شیلینگ،
کتابی که در زمینه رباتیک، که چند فصل از محاسبات ساده و روابط سینماتیکی شروع کرده
و در انتها با کنترل های کلاسیک(خطی) سیستم شما رو کنترل می کند، به دلیل قدیمی
بودن کتاب، مباحث کنترل مدرن و شبکه عصبی و کنترل غیر خطی و... ارائه نگردیده، که
به علاقه ونیاز خود فرد برای پیگیری احتیاج است،
اگر زبان اصلی بودن اذیتتون میکنه،
میتونید کتاب رباتیک پیشرفته از دکتر حبیب نژاد رو از انقلاب تهیه کنید.
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۷:۵۰]
[In reply to samakoush]
من کتاب رباتیک کریگ رو پیشنهاد میکنم ترجمه پروفسور مقداری
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۷:۵۰]
PDF شم تو نت پیدا میشه
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۷:۵۰]
[In reply to samakoush]
البته ممنون از پیشنهادتون
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۵۲]
[In reply to Mohammad Yousefi]
لطف می کنید کتاب را ارائه دهید؟ ممنون
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۷:۵۲]
[In reply to ahmad shokhmgar]
حتما جناب شخمگر
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۵۲]
[In reply to Mohammad Yousefi]
مهندس جان شما هم باید الان یک رزومه ای از خود بدهید. ممنون
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۵۵]
[ Photo ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۷:۵۶]
[ Photo ]
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۷:۵۶]
بنده یوسفی هستم.فارغ التحصیل مهندسی رباتیک.بیشتر تحقیقاتم در زمینه رباتهای
صنعتیه.مشغول به کار در شرکت نوین ایلیا صنعت اصفهان.نمایندگی کمپانی Basler المان
و تامین کننده تجهیزات بینایی ماشین
samakoush, [۰۹.۰۲.۱۶ ۰۷:۵۸]
جا اداره اینجا یه گله از عزیزان آکادمیک کنم.
یکی از مهمترین ضعف های افراد اکادمیک ما در ایران، صرفا دادن
paper
(به لفظ بنده، کاغذ بازی) هست.
افراد آکادمیک تمام تلاششون رو می کنند که فقط اسمشون بره در لیست مقاله دهندگان در
آی اس آی،
گاهی من میبینم واقعا مقالات فوق العاده نابی ارائه می کنند که میتونه روش های
بسیار مدرن را در صنعت معرفی کنه.
بدون اینکه بدونند فقط دارند لقمه آماده رو میزارند در دهان کمپانی های بزرگ،
جالبه حتی برای ارائه این خدمت به کمپانی ها، هزینه به دلار هم می کنیم.
برای پیشرفت نباید منتظر محیط موند تا دست انسان رو بگیره.
باید محیط رو محاط خود کرد.
samakoush, [۰۹.۰۲.۱۶ ۰۷:۵۹]
افتخارمونم اینه مصرف کننده از کشور های دهن پر کن تر باشیم.
آلمان ایتالیا و تهش بگیم از امریکا جنس میاریم....
samakoush, [۰۹.۰۲.۱۶ ۰۸:۰۱]
ببخشید بحث رو به حاشیه بردم مهندس شخم گر
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۸:۰۱]
[ File : njit-etd2000-058.pdf ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۸:۰۴]
[In reply to samakoush]
جانا سخن از جان دل ما می گویی. کاملا موافقم.
پیشنهاد دادند برای آمریکا. خودم و همسرم و فرزندم
خونه و ماشین و ... من دنبالش نبودم. آنها دنبالم بودن.
گفتم نه. و به این نه می بالم.
اگر فقط دوتا از پروژه های نظامی که انجام دادم را روکنم هر کشوری بخوام رو هوا می
برنم.
اما جوابم نه است . بهترین جا ایران و تمام تلاشم رشد مملکتم است.
مهندس جان همیشه در ذهنتان باشد یک نفر محکم ایستاده.
شما هم باشید می شویم دوتا و دو یعنی خیلی زیاد
دوستان هم اگر هستند بگویند که هستند تا بیشتر شویم
samakoush, [۰۹.۰۲.۱۶ ۰۸:۰۵]
[ File : DSC00319.3GP ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۸:۰۸]
[ File : njit-etd2000-058.pdf ]
samakoush, [۰۹.۰۲.۱۶ ۰۸:۰۸]
شرکت میشلن امریکا سال در 2011 دقیقا بنده رو طلبید.
اما بنده گفتم نه.
کاری کردم در سایتشون نام کشور ایران رو اضافه کنند.
اما خودم نپذیرفتمشون.
samakoush, [۰۹.۰۲.۱۶ ۰۸:۱۰]
امیدوارم یک روز متخصصامون توی گروه از کنترلر ها و تجهیزاتی ک شرکت های خودشون
ارائه کردن صحبت کنن
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۸:۱۷]
[In reply to Mohammad Yousefi]
مهندس جان در گروه بیشتر ببینیمتون.
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۴۰]
[ File : Mechanics-and-Control-in Robotics.pdf ]
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۴۱]
مکانیک و کنترل در رباتیک جان کریگ ترجمه دکتر مقداری👆🏻👆🏻👆🏻👆🏻👆🏻
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۴۱]
[In reply to ahmad shokhmgar]
حتما جناب شخمگر.باعث افتخاره
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۴۳]
[ File : ماشینکاری ربات.pdf ]
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۴۴]
اینم یک مقاله در زمینه ماشینکاری ربات صنعتی
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۴۶]
[ File : مفاهیم.pdf ]
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۴۶]
توضیحاتی در مورد کنترلر ربات و teach pendent نحوه کار با انها
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۴۷]
[ File : کنترل ربات موازی prr.pdf ]
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۴۷]
مقاله ای در زمینه کنترل ربات موازی یا دلتا
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۴۸]
تمام این فایل ها به زبان فارسی میباشد دوستان مطالعه کنند
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۴۹]
[ File : روش نقاط تعلیم مجازی.pdf ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۸:۴۹]
[In reply to Mohammad Yousefi]
عجب کتابیه. زمانیکه در حل سینماتیک معکوس ربات 7 درجه آزادی در سال فکر کنم قبل از
82 بود به شدت گیرکرده بودم و راه حل ماتریس پیدا نمی شد و شش ماه تمام وقتم را
گرفت. اما این کتاب من را از چالش در آورد و روش حل معادله را نشان داد. انصافا یک
صفحه A4 کامل از معادله پر از سینوس و کسینوس و راه حل مملو از آرک سینوس و آرک
کسینوس و آرک تانژانت و ... یادش بخیر واقعا حوصله داشتیم.
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۴۹]
روش تعلیم نقاط مجازی برای راه اندازی ربات
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۵۱]
[ File : سینماتیک وارون بازوی 7 درجه ازادی.pdf ]
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۸:۵۱]
[In reply to Mohammad Yousefi]
مهندس جان قول دادم بحث بعدی سی ان سی نگین انگشتر باشد . موافقید بعد از آن را به
رباتها بپردازیم و چندین جلسه در خصوص انواع رباتهای صنعتی بحث کنیم؟
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۵۲]
[In reply to ahmad shokhmgar]
جناب شخمگر این هم مقاله ای در زمینه حل سینماتیک معکوس ربات هفت درجه ازادی
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۵۲]
[In reply to ahmad shokhmgar]
عالیه.حتما
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۸:۵۴]
[In reply to Mohammad Yousefi]
راستش خیلی دلم برای رباتها تنگ شده. می خوام برم تو اون دوران
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۵۵]
[In reply to ahmad shokhmgar]
متاسفانه در ایران نیاز چشمگیری به رباتهای صنعتی نمیشه دید
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۵۵]
یا شاید من اشتباه میکنم
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۵۶]
من بیشتر از جهارسال وقتمو گذاشتم روی ربات های صنعتی
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۵۶]
البته در ابتدا در مباحث تئوری
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۵۷]
ولی بعدا سعی کردم وارد حیطه عمل بشم
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۵۷]
ولی متاسفانه اون نیازو نمیبینم
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۸:۵۷]
1480 کیلومتر با اتوبوس راه رفتم تا از دکتر .... یک سوال بپرسم که مکانیزم مچ دست
چگونه است. یک ساعت و نیم من را پشت درب نگه داشت و در نهایت جوابی نگرفتم . می
توانید یک دانشجوی این تیپی الان در کل دانشگاههای ایران پیدا کنید؟
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۸:۵۷]
سال 1377
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۵۸]
[In reply to ahmad shokhmgar]
واقعا تحسین برانگیزه
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۸:۵۹]
شما بازار رباتهای صنعتی رو به چه شکل میبیند؟
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۹:۰۰]
یک سری زالو در این صنعت رسوخ کرده اند و ایران را به گند کشیده اند. خدا لعنت کند
شرکت تام ایران خودرو را.
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۹:۰۱]
من سایتشون رو دیدم .بزرگترین سایت رباتیک کشور.بیش از شصت سلول رباتیک
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۹:۰۲]
ولی تلاشی در جهت خودکفایی نمیکنند
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۹:۰۲]
می توانستند ربات را در ایران به اوج برسانند اما با ترس مزخرفشان از پست و مقام و
عقده بازدید از کشورهای خارجی و عدم مسدولیت پذیری در خصوص خط تولید و پول بی زبان
مردم عزیز ایران بالاترین درجه رباتیک را در اختیار بدترین مهندسین قرار داده است.
خداوند لعنت شان کند . از ریاستش تا آبدارچی اش.
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۹:۰۳]
تنها یک نرم افزار تام ویژن درست کردند برای کار کوچک تست برچسب خودرو
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۹:۰۴]
ولش کن مهندس اعصابم بهم ریخت
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۹:۰۴]
خودتونو ناراحت نکنید حناب مهندس انشاالله همه چی درست میشه
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۹:۰۵]
خوشحال شدم از صحبت با شما
Mohammad Yousefi, [۰۹.۰۲.۱۶ ۰۹:۰۵]
به امید موفقیت
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۹:۰۵]
[In reply to Mohammad Yousefi]
موفق باشید
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۰۹:۰۸]
اگر از دوستان کسی هست که می تواند صدای ما را به مسئولین تام ایران خودرو برساند
به ایشان بگوید اگر کمترین بهره ای از علم رباتیک در گروهتان پیدا می شود برای
مباحثه با کل گروه ایشان آماده ام. گرچه می دانم از گروه با دبدبه و پرکبکبه آنها
کسی دنبال دانش و ... نیست.
Alireza Sarayani, [۰۹.۰۲.۱۶ ۱۰:۱۷]
جناب شخمگر، سلام. در خصوص فرمایش شما در نورد کنترلر، دقیقا همینطور است. سیستم ها
همه چیز اماده هستند وصرفا باید اونا رو بهم
وصل کنیم. در خصوص ربات دلتا و سیمولاتور، کنترلر های ما توابعش رو ساپورت می کنند.
نیازی به حل ماتریس و معادله نیست. شما توی مختصات xyz مختصات رو میدید به سیستم و
سیستم عامل، خودش با محاسبات ۶۴ بیتی، حرکت شش محور رو محاسبه میکنه. فیلمش رو تو
گروه میفرستم
بابک عظیمی, [۰۹.۰۲.۱۶ ۱۰:۲۰]
[In reply to ahmad shokhmgar]
دقیقا تمام درد شکایت استادم ، مرحوم دکتر لوکس هم در آن موقع همین بود . سال 1371
. میگفت تا مدیران صنعت بخواهند بیدار شوند ما ها زیر خاک رفتیم.
samakoush, [۰۹.۰۲.۱۶ ۱۰:۳۶]
یک سوال؟
چرا مهندسان هسته ای رو ترور می کنند؟
اما سراغ مهندسان ایرانخودرو نمیرند؟!
چون جواب این سوال برای ایران خودرو گرون تموم میشه.
بابک عظیمی, [۰۹.۰۲.۱۶ ۱۱:۳۵]
[In reply to ahmad shokhmgar]
اصلا بگید چند درصد فارغ اتحصیل ها پروژه ی ساخت داشتند. 90 درصد دنبال ترجمه و
مقاله 20 صفحه ای ..و یک نمره گلابی برای واحد پروژه هستند. قبلا هم همینطور بود.
اگر دانشجویان مهندسی درگیر ساخت نشوند هیچگاه دنبال حل مشکلات صنعت هم نمیروند.
آخرش میشوند مهندس معکوس
Hassan Hadidi, [۰۹.۰۲.۱۶ ۱۶:۲۷]
سلام به همه
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۱۶:۲۸]
سلام خوش آمدید.
فرید, [۰۹.۰۲.۱۶ ۱۶:۲۹]
سلام خوش اومدین
Hassan Hadidi, [۰۹.۰۲.۱۶ ۱۶:۳۴]
متشکرم مهنوس
Hassan Hadidi, [۰۹.۰۲.۱۶ ۱۶:۳۴]
مهندس
Hassan Hadidi, [۰۹.۰۲.۱۶ ۱۶:۳۴]
[In reply to بابک عظیمی]
کدوم ساخت؟کدوم اسپانسر؟
Hassan Hadidi, [۰۹.۰۲.۱۶ ۱۶:۳۴]
من خودم الان می خواستم شروع کنم به ساخت. بیشتر از 5 میلیون هزینه طرح قیمت
داره،خودش هم 30 تومن تموم می شه .من از کجا بیارم این همه هزینه کنم بعد آخرش هم
بتونم کار کنم باهاش یا نه؟
Hassan Hadidi, [۰۹.۰۲.۱۶ ۱۶:۳۴]
تو ایران ساخت نمی صرفه فروش و دلالی به صرف ترو آسون تره
Hassan Hadidi, [۰۹.۰۲.۱۶ ۱۶:۳۴]
همه چی همینتوره
Hassan Hadidi, [۰۹.۰۲.۱۶ ۱۶:۳۴]
البته جسارت نشه منظوره خاصی ندارم
Poya GrG, [۰۹.۰۲.۱۶ ۱۶:۳۶]
[In reply to Hassan Hadidi]
👌👍
ahmad shokhmgar, [۰۹.۰۲.۱۶ ۱۸:۲۴]
جناب آقای کفاشان عزیز خوش آمدید. عکس دستگاهی که ساختید را ارائه می دهید؟
کفاشان کنترلر, [۰۹.۰۲.۱۶ ۱۸:۲۹]
[ Photo ]

کفاشان کنترلر, [۰۹.۰۲.۱۶ ۱۸:۲۹]
باسلام به همه
بابک عظیمی, [۰۹.۰۲.۱۶ ۱۹:۴۸]
[In reply to Hassan Hadidi]
تجربه من سال 1370 مربوط به ساخت پاندول معکوس بعنوان پایان نامه بود که حتی یکنفر
هم قبول نکرد مشترکا بسازیم. آخرش تنهایی ذره ذره 6 ماه طول کشید تا تمام شد. پول
خرید ریل و واگن نداشتم. همه را با مفتول و قرقره پلاستیکی و چوب و کش شلوار...درست
کردم. کلا 2000 تومن خرج شد ( کمک هزینه دانشجو 800 تومان بود). نباید نا امید شد.
با اینکه ارتباط دانشگاه و صنعت ما همیشه ضعیف بوده. ولی ما کار خودمان را باید
ادامه دهیم تا نتیجه دهد و ببینند.
اکبر هوشیار, [۰۹.۰۲.۱۶ ۲۰:۳۷]
تقدیم به ولی اعظم خداوند
حضرت حجت ابن الحسن العسکری
عجل الله فرجه الشریف
هرگز ز عمر خویش شکایت نکرده ام
عمری که در هوای تو باشد ستودنی ست
اکبر هاشمی, [۰۹.۰۲.۱۶ ۲۱:۵۴]
فرصت پیدا نمشه فرصت ساخته میشود
نقطه صفر پروژه مطالعه و تحقیق است
مطالعه برای ساخت
تحقیقات برای بازاریابی و فروش
کسی هست که بگه تولید و ساخت سخته
نه نیست
فروش خوب سخته
شما کالای خوب برای فروش داشته باش مشتری از اون طرف کره زمین میاد
ولی اگر فکر تولید برای دل خودمون باشیم نه کسی برای دل ما سرمایه گذاری نمیکنه
يونس کفاشان, [۰۹.۰۲.۱۶ ۲۲:۱۲]
سلام آقاي شخمگر برد رو رو اين دستگاه نصب کردم
بابک عدلی, [۱۰.۰۲.۱۶ ۰۰:۴۱]
سلام خدمت دوستان من برای پایاننامه به نقشه یک اسپیندل دور بالا نیاز دارم خصوصا
محورش از دوستان خواهش می کنم اگه میتونند تو این مورد کمکم کنند
بابک عدلی, [۱۰.۰۲.۱۶ ۰۰:۴۱]
لطفا پی وی بدید
Mohamadashtarani Mohamadsh, [۱۰.۰۲.۱۶ ۰۵:۲۵]
[Forwarded from دوستانه]
[ Photo, صبحگاهی به لبت فرصت لبخند بده
دوسه خط شعربخوان
کم به خودت پند بده
موی خودشانه سپس
ادکلن گرم بزن
لقمه ی عشق بگیر
ازلب خودقندبده
@dosta_neh ]
samakoush, [۱۰.۰۲.۱۶ ۰۷:۰۷]
[In reply to اکبر هاشمی]
"شما کالای خوب برای فروش داشته باش مشتری از اون طرف کره زمین میاد "
احسنت مهندس، حرف دل بنده رو زدید.
حدود 5 ماهه پیش یک بنده خدا اومد باهم مشورت کنه که چی تولید کنه،
خودش توی ذهنش بود که فیلتر ماشین تولید کنه،
هرچی بنده بهش گفتم بازار حقیقیش با اونچه در رویاهات داری میپروری فرق داره، و دست
و تنوع تولید کننده به شدت زیاده، اما ایشان ته دلش نپذیرفت،
مجابش کردم برود چند کارتن از اون محصول رو از بازار بخره و فرض کنه که الان خودش
تولید کرده و میخواد بفروشه،
راه افتاد در بازار، و حتی یک عدد از فیلتر هارو نتونست بفروشه و به حرف من رسید،
حالا در نقطه مقابلش، یک محصول که با بررسی و تحلیل در بازار داریم دست به تولیدش
بزنیم،
چند تا از مشتری(دو نفر فقط صادر کننده) از خود ما پیگیر ترند که کی محصول رو به
دستشون میرسونیم.
فرق تولید و ساخت منطقی و معقول با اینکه فقط اینو بسازم فرق داره.
ماها در ذهنمون تصور میکنیم فقط کافیه این ساخته بشه، از فرداش معجزه میشه.
توجه شمارو به سخن آقای فورد جلب میکنم.
samakoush, [۱۰.۰۲.۱۶ ۰۷:۰۷]
✳️ از «فورد» ميلياردر معروف آمريكايي و صاحب يكي از بزرگترين كارخانههاي سازنده
انواع اتومبيل پرسيدند:
✳️ اگر شما فردا صبح از خواب بيدار شويد و ببينيد تمام ثروت خود را از دست دادهايد
و ديگر چيزي در بساط نداريد، چه ميكنيد؟
✳️ فورد پاسخ داد:
🔶 «دوباره يكي از نيازهاي اصلي مردم را شناسايي ميكنم و با كار و كوشش، آن خدمت
را با كيفيت و ارزان به مردم ارائه ميدهم و مطمئن باشيد بعد از پنج سال دوباره
فورد امروز خواهم بود.»
🔶 قانون زندگی٬ قانون باورهاست
🔶 بزرگان زاده نمیشوند٬ ساخته میشوند
samakoush, [۱۰.۰۲.۱۶ ۰۷:۱۶]
کسی که وارد یک بازی بشه،
احتما داره ببازه و احتمال داره پیروز بشه،
ولی کسی که از ترس باخت، وارد بازی نشه، تمام عمرش یک بازندس و به باختش قانع هست،
ما وقتی یک بار شکست بخوریم، فکر میکنیم اون راه بلوکه هست و دیگه وارد اون بازی
نباید شد، در صورتی که باید علت های شکستمون رو ریشه یابی منطقی کنیم و نه اینکه
بندازیم گردن اینکه وای شرایط اطراف بده و جای پیشرفت وجود نداره،
آقای ادیسون، فقط بیست سال تموم طول کشید تا بتونه بفهمه که چکار کنه تا لامپ وقتی
روشن می شود ، نسوزد.
اینکه اکسیژن رو از بالب لامپ خارج و بجاش گاز بی اثر بفرسته داخلش،
و نتیجه اش این شد که ثروت هنگفتی براشون پدید اومد و شرکت GE مال ایشون هست.
شما تصور کنید، کنید ایشون همون پنج سال اول یا ده سال اول یا اصلا بعد 19 سال رها
میکرد این لامپو و به این نکته پی نمیبرد،
اتفاقی که میفتاد این بود که هیچکس نه الان ایشون رو می شناخت و نه اینکه کمپانی ge
مال ایشون بود.
سلام
کسی در مورد نرم افزار های پرینترسه بعدی اطلاعی داره؟ نسخه رایگان یا تحت لینوکس
هست براش ؟
بله.
من فردا یکیشو که برای پرینتره های
solidscap
رو میزارم تو گروه.
اسم نرم افزارش model work هست.
روی هر پی سی ای هم بالا میاد.
--------------------
یکی از دوستان در مورد گنتری کردن سرو موتور ها سوالی پرسیده بود که سروو ها رو
چجوری میشه گنتری کرد؟
اینم پاسخی که بهشون دادم:
برای گنتری دو روش کلی وجود داره:
🎯یکی با خود سرو ها(به شرطی که سروو ساپورت کنه) مثل سروو A2
🎯یکی هم با کنترلر(به شرطی که کنترلر ساپورت کنه)مثل کنترلر های TexComputer
در مکانیزم گنتری با سروو ،خود سروو ها دوتافیدبک میگیرند(یکی از انکودر خودشون و
یکی از انکودر سروو کناریش)
در مکانیزم گنتری با کنترلر، هر سروو به یک محور وصل میشه و اختلاف بین سروو ها
توسط کنترلر محاسبه میشه . این روش کاملترین روش سنکرون کردن هست. کنترلر اختلاف
بین محورها رو حساب میکنه و در صورتی که اختلاف از حد مجاز بیشتر شد، سیستم رو
جبران کنه یا سیستم رو اصلاح کنه.
💥یک نمونه کاربردش که گنتری با کنترلر TexComputer بود(و نمیشه با سرو پیاده کرد)
جبران مقدار انحراف دکل دستگاه برش پلاسما (و همچنین واترجت) هست. اگه محور x و
محور y گونیا نباشند، محورگنتری مقدار انحراف رو جبران میکنه تا عملیات تعامد انجام
بشه و بعد این اختلاف رو همواره نگه میداره.
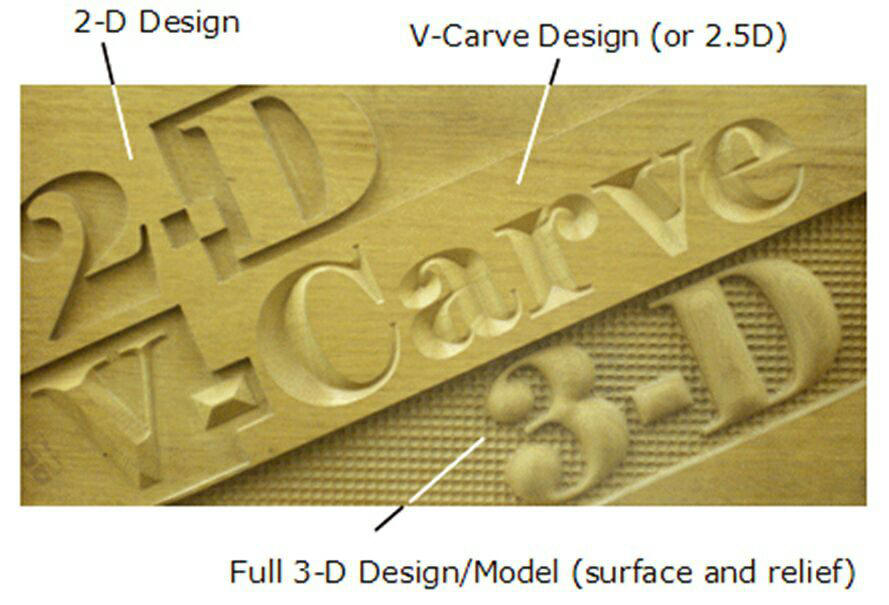
[ Photo, مقایسه کار 2 بعدی و 2 5 بعدی و 3 بعدی ]
ادامه مطالب در
صفحه بعد
در صورت داشتن سوال تخصصی اینجا را کلیک نمایید در کمتر از 48 ساعت پاسخ می دهیم
آخرین پاسخ های ارائه شده به سوالات دوستان

